046 047
46 Anna Borowska. Rafał Chaba
gdzie:
1 = arctg
Po wstawieniu wartości T i C, otrzymamy:
Ah(t) = xs, [0,37 + 2.78<T0'0268' sinOJ 44/] +
(2-67)
:„[o.378e~°0268' sin[o,144/ -100°30']]
Wykres odpowiedzi na zakłócenie skokowe przedstawiono na rys. 2.8
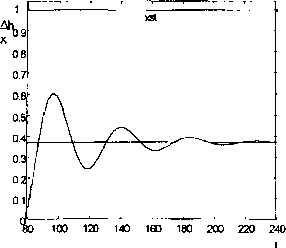
Rys. 2.8. Odpowiedź skokowa układit z rys. 2.6
Jak widać z wykresu zastosowany regulator nie kompensuje całkowicie zakłócenia działającego na obiekt. W stanie ustalonym istnieje odchylenie wielkości regulowanej od wartości zadanej Ah = 0,37 x st.
Literatura:
1. HOLEJKO D.. KOŚCIELNY W.. NIE WCZAS W. Zbiór zadań z podstaw automatyki. Warszawa. Wydawnictwo Politechniki Warszawskiej 1985
2. PEŁCZEWSKI W. Teoria sterowania. Warszawa. WNT 1980
3. STEFAŃSKI T. Teoria sterowania. Część 1. Skrypt nr 270. Kielce. Wydawnictwo Politechniki Świętokrzyskiej 1995
Rozdział 3
CHARAKTERYSTYKI CZASOWE I CZĘSTOTLIWOŚCIOWE
r
3.1. Wprowadzenie [1], [2]
I Transformacją operatorową G(s) obiektu liniowego ciągłego stacjonarnego nazywa się stosunek transformaty Laplace'a wielkości wyjściowej y(s) po transformaty Laplace’a wielkości wejściowej x(s) przy zerowych warunkach początkowych:
IV
(3.1)
G(,).*£) = >2-
A ,
2*ais
t=0
yiJ){0) = 0, i/(/)(0) = 0, / = 0,1.....w -1; j = 0,l,...,m- 1
| Transmitancja operatorowa jest zwykle ilorazem dwóch wielomianów | zmiennej zespolonej s:
(3.2)
| = bm s™ + K-\ +—+*is + ł>o _ M(s)
i ansn +an_]sn~i +...+«] s + a0 N(s)
Wyszukiwarka
Podobne podstrony:
046 047 46 Anna Borowska. Rafał Chaba gdzie: fi = arctg Po wstawieniu wartości T i C, otrzymamy: Ah(
034 035 34 Anna Borowska, Rafał Chaba Wykonując transformatę Lapiace a i eliminując prąd otrzymamy 1
040 041 40 Anna Borowska. Rafał Chaba Odpowiedź jednostkowa: h{t) = k{t - r0) (2.40) Odpowiedź
042 043 42 Anna Borowska. Rafał Chaba Ql=hffh (2.44) Ponieważ zależność (2.44) jes
044 045 44 Anna Borowska, Rafał Chaba Na podstawie tego schematu wyznaczamy transmitancję układu w p
044 045 44 Anna Borowska. Rafał Chaba Na podstawie tego schematu wyznaczamy transmitancję układu w p
036 037 36 Anna Borowska, Rafał Chaba 2.2.4. Człon różniczkujący W członie różniczkującym idealnym s
038 039 38 Anna Borowska. Rafał Chaba 2.2.5. Człon oscylacyjny Najprostszy człon liniowy drugiego rz
040 041 40 Anna Borowska. Rafał Chaba Odpowiedź jednostkowa: h(ł) = k(ł-T0)
042 043 42 Anna Borowska. Rafał Chaba Ql=hf^ (2-44) Ponieważ zależność (2.44) jest
046 047 2 46 -?UaP. I ćUA. i O i/r c? SzKuuaO... ; -5 je/fł l&U-rtęAjCtMs * l
036 037 36 Anna Borowska, Rafał Chata 2.2.4. Człon różniczkujący W członie różniczkującym idealnym s
038 039 38 Anna Borowska. Rafał Chaba2.2.5. Człon oscylacyjny Najprostszy człon liniowy drugiego rzę
046 047 46 Nie należy także wykonywać wszystkich możliwych sklejeń, tzn. w "tym przypadku skład
032 033 32 Anna Morawska. Rafał Chaba natomiast odpowiedź jednostkowa wynosi (2.3) h(s) = -sMO = Prz
1 1 toL — gdzie <p = arctg-----= Po podstawieniu parametrów danych !
więcej podobnych podstron