034 035
34 Anna Borowska, Rafał Chaba
Wykonując transformatę Lapiace'a i eliminując prąd otrzymamy
10)
1 + sRC 1 + sRC
Zakładając £/in.(0) = 0 znajdziemy transmitancję
t 1
6(5) = -—--=
Unv(3) \ + sT
(2.11)
gdzie: T = RC oznacza stałą czasową.
A zatem czwornik RC jest członem inercyjnym pierwszego rzędu o współczynniku wzmocnienia k — 1 .
2.2.3. Człon całkujący
Równanie i transmitancja idealnego członu całkującego wyrażają się wzo-
ram i
dy{t) di
ku{i)
(2.12)
S
(2.13)
gdzie: k - współczynnik wzmocnienia równy stosunkowi pochodnej sygnału wyjściowego do sygnału wejściowego w stanie ustalonym.
Przykładami członu całkującego idealnego są: kondensator idealny, siłownik hydrauliczny, zbiornik cieczy.
W rzeczywistości rzadko spotyka się idealne człony całkujące. Tylko przy pewny ch założeniach można przyjąć, że niektóre człony zachowują się jak całkujące. Takie człony przedstawia się przy pomocy całkowania z inercją. Równanie takiego członu jest następujące
(2.J4)
gdzie:
k - współczynnik wzmocnienia. T- stała czasowa.
Transmitancja operatorowa członu całkującego z inercją ma postać
<2.15
G{s) =
k
s(l + sT)
Przykładem członu całkującego z inercją jest czwórnik RC przedstawiony na rys,2.3.
R
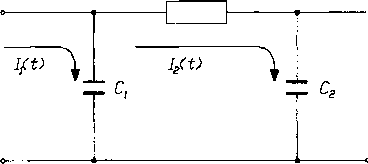
Rvx.2.3. Czwórnik RC
W układzie przedstawionym na ry s. 2.3 sygnałem wejściowym jest prąd /, (r) płynący przez kondensator Cj. a sygnałem wyjściowym - napięcie na kondensatorze C,. Napięcia na kondensatorach Cj i C2 są następujące:
(2.16)
(2.17)
— J/, (r)dr = Rl, (/) + — J/j (r )dz
L ' o -o
\h(r)dT
C2 0
Po wykonaniu transformacji Laplace*a pr2y zerowych warunkach początkowych otrzymujemy transmitancję
G(s) =
/](s) s(\ + sT)
gdzie: T = RC2 oznacza stałą czasową.
(2.18)
Wyszukiwarka
Podobne podstrony:
034 035 34 Anna Barańska, Raf iii ( baba Wykonując transformatę Laplace"a i eliminując prąd otr
046 047 46 Anna Borowska. Rafał Chaba gdzie: 1 = arctg Po wstawieniu wartości T i C, otrzymamy: Ah(t
040 041 40 Anna Borowska. Rafał Chaba Odpowiedź jednostkowa: h{t) = k{t - r0) (2.40) Odpowiedź
042 043 42 Anna Borowska. Rafał Chaba Ql=hffh (2.44) Ponieważ zależność (2.44) jes
044 045 44 Anna Borowska, Rafał Chaba Na podstawie tego schematu wyznaczamy transmitancję układu w p
046 047 46 Anna Borowska. Rafał Chaba gdzie: fi = arctg Po wstawieniu wartości T i C, otrzymamy: Ah(
044 045 44 Anna Borowska. Rafał Chaba Na podstawie tego schematu wyznaczamy transmitancję układu w p
036 037 36 Anna Borowska, Rafał Chaba 2.2.4. Człon różniczkujący W członie różniczkującym idealnym s
038 039 38 Anna Borowska. Rafał Chaba 2.2.5. Człon oscylacyjny Najprostszy człon liniowy drugiego rz
040 041 40 Anna Borowska. Rafał Chaba Odpowiedź jednostkowa: h(ł) = k(ł-T0)
042 043 42 Anna Borowska. Rafał Chaba Ql=hf^ (2-44) Ponieważ zależność (2.44) jest
034 035 2 34 Programowanie liniowePierwszy warunek ograniczający: 2x, + 2x2+x3 = 14. Ponieważ x, = 1
034 035 34 2. Wstępne obliczenia wytrzymałościowea) płaszczyzna ,.v" Rys. 2.16. Momenty gnące o
034 035 34 Wypełniamy tabelę jak pokazano na rys. 1.20, z której na podstawie wzorów (1.10), (1.11)
036 037 36 Anna Borowska, Rafał Chata 2.2.4. Człon różniczkujący W członie różniczkującym idealnym s
038 039 38 Anna Borowska. Rafał Chaba2.2.5. Człon oscylacyjny Najprostszy człon liniowy drugiego rzę
032 033 32 Anna Morawska. Rafał Chaba natomiast odpowiedź jednostkowa wynosi (2.3) h(s) = -sMO = Prz
więcej podobnych podstron