238 (22)
476
18. Schematy blokowe. Grafy sygnałowe Masona

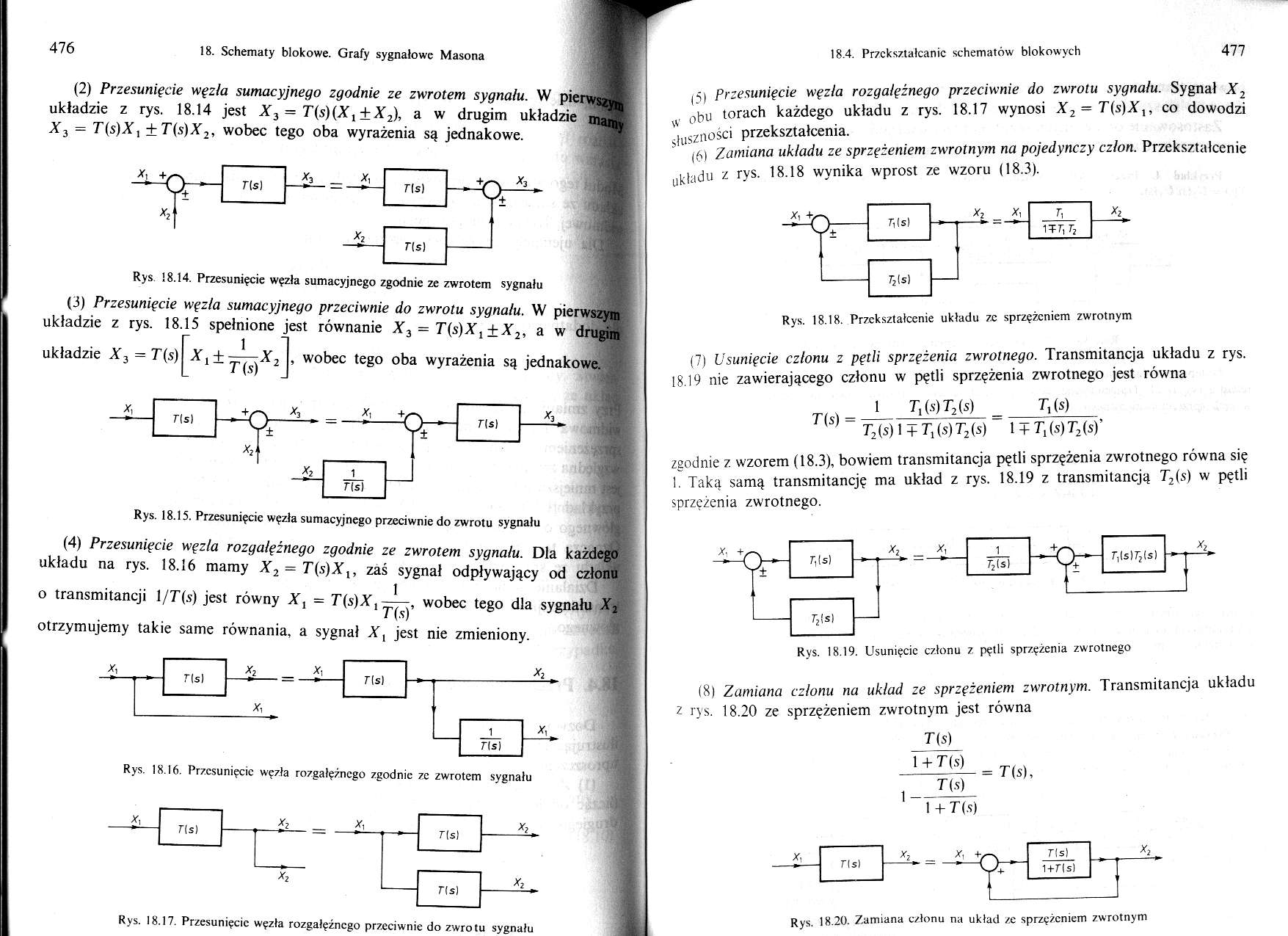
(2) Przesunięcie węzła sumacyjnego zgodnie ze zwrotem sygnału. W pierwszym układzie z rys. 18.14 jest X3 = T(s)(X, ±X2), a w drugim układzie mamy X3 = T(s)X] ±T(s)X2, wobec tego oba wyrażenia są jednakowe.
Rys 18.14. Przesunięcie węzła sumacyjnego zgodnie ze zwrotem sygnału
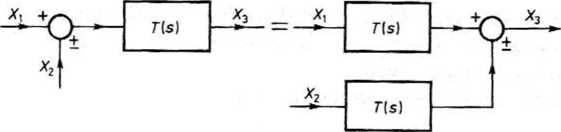
(3) Przesunięcie węzła sumacyjnego przeciwnie do zwrotu sygnału. W pierwszym układzie z rys. 18.15 spełnione jest równanie X3 = T(s)X1 ±X2, a w drugim
układzie X3 — T(s)
*i±
T(s)Xz
Rys. 18.15. Przesunięcie węzła sumacyjnego przeciwnie do zwrotu sygnału
, wobec tego oba wyrażenia są jednakowe.
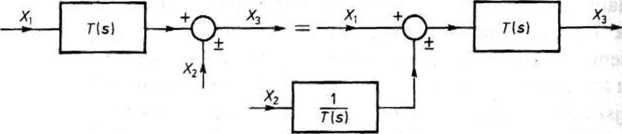
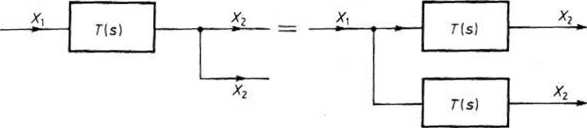
(4) Przesunięcie węzła rozgałęźnego zgodnie ze zwrotem sygnału. Dla każdego układu na rys. 18.16 mamy X2 = T(s)Xx, zaś sygnał odpływający od członu
o transmitancji 1/T(.s) jest równy Xt = T(s)Xl—, wobec tego dla sygnału X2
T(s)
otrzymujemy takie same równania, a sygnał Xx jest nie zmieniony.
Rys. 18.16. Przesunięcie węzła rozgałęźnego zgodnie zc zwrotem sygnału
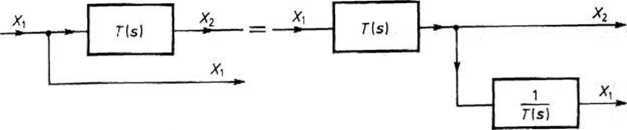
Rys. 18.17. Przesunięcie węzła rozgałęźnego przeciwnie do zwrotu sygnału
18.4. Przekształcanie schematów blokowych
477
(5) Przesunięcie węzła rozgałęźnego przeciwnie do zwrotu sygnału. Sygnał X2 w obu torach każdego układu z rys. 18.17 wynosi X2 = T(s)X,, co dowodzi słuszności przekształcenia.
(6) Zamiana układu ze sprzężeniem zwrotnym na pojedynczy człon. Przekształcenie układu z rys. 18.18 wynika wprost ze wzoru (18.3).
Rys. 18.18. Przekształcenie układu ze sprzężeniem zwrotnym
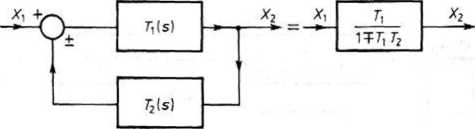
(7) Usunięcie członu z pętli sprzężenia zwrotnego. Transmitancja układu z rys. 18.19 nie zawierającego członu w pętli sprzężenia zwrotnego jest równa
T() = J__T,(s)T2(s) = 7j(s)
r2(s)l TTJjJTjls) l + 7j(s)r2(s)’
zgodnie z. wzorem (18.3), bowiem transmitancja pętli sprzężenia zwrotnego równa się 1. Taką samą transmitancję ma układ z rys. 18.19 z transmitancją T2(s) w pętli sprzężenia zwTotnego.

Rys. 18.19. Usunięcie członu z pętli sprzężenia zwrotnego
(8) Zamiana członu na układ ze sprzężeniem zwrotnym. Transmitancja układu z rys. 18.20 ze sprzężeniem zwrotnym jest równa
T(s)
1 + T(s)
1
T(s)
1 + T(s)
= T(s),

Rys. 18.20. Zamiana członu na układ ze sprzężeniem zwrotnym
Wyszukiwarka
Podobne podstrony:
235 (22) 470 18. Schematy blokowe. Grafy sygnałowe Masona Na podstawie rys. 18.6 otrzymujemy
234 (23) 468 18. Schematy blokowe. Grafy sygnałowe Masona 18.2. Schematy blokowe &nb
236 (23) 472 18. Schematy blokowe. Grafy sygnałowe Masona Połączenie z rys. 18.10 nazywa się układem
237 (19) 474 18. Schematy blokowe. Grafy sygnałowe Masona dwóch przypadków: 1) przy t2 > 0, tzn.
239 (20) 478 18. Schematy blokowe. Grafy sygnałowe Masonabowiem transmitancja pętli sprzężenia zwrot
240 (21) 480 18. Schematy blokowe. Grafy sygnałowe Masona grafy obwodów omawiane w p. 1.3.2. Jak wia
242 (24) 484 18. Schematy blokowe. Grafy sygnałowe Masona a stądII = 7.,+T2U + Zl+Z212’ / = &
243 (20) 486 18. Schematy blokowe. Grafy sygnałowe Masona węzłem, co pozwala obliczyć sygnał tego wę
244 (21) 488 18. Schematy blokowe. Grafy sygnałowe Masona W celu uzasadnienia przekształcenia, na po
245 (18) 490 18. Schematy blokowe. Grafy sygnałowe Masona Przykład 4. Obliczymy transmitancję T(s) =
241 (20) 482 t8. Schematy blokowe. Grafy sygnałowe Masona 2 Rys. 18.28. Graf sygnałowy Masona zawier
redukcja schematów blokowych 2 I fc-oisj 10 Przesunięcie węzła sumacyjnego za człon X,(s)± X2(s
DSC00102 (18) 3. Schemat blokowy stan<wwks« misr? W t (jfe }-- M" l^(K*ifc 3 -pr*6.CGjiv^ p
Rys. 18.1. Schematy blokowe układów napędowych ciągnika: a) z napędem na jedną oś, b) z napędem na d
Rys. 18.5. Schemat blokowy układu zasilania. Elementy precyzyjne układu wtryskowego którymi są: pary
Image 52 56 Rys. 3.18. Schemat blokowy hydrostatycznego układu napędowego 2. wykor
89970 skanuj0410 Rys. 18. Schemat blokowy formułowania strategii typu SW-*OT W stopień atrakcyjności
18 19 18 I Schemat zastępczy szeregowy Ur - napięcie czynne (składowa czynna) związane ze zjawiskiem
więcej podobnych podstron