253 (16)
506 19. Zastosowanie przekształcenia dyskretnego $f
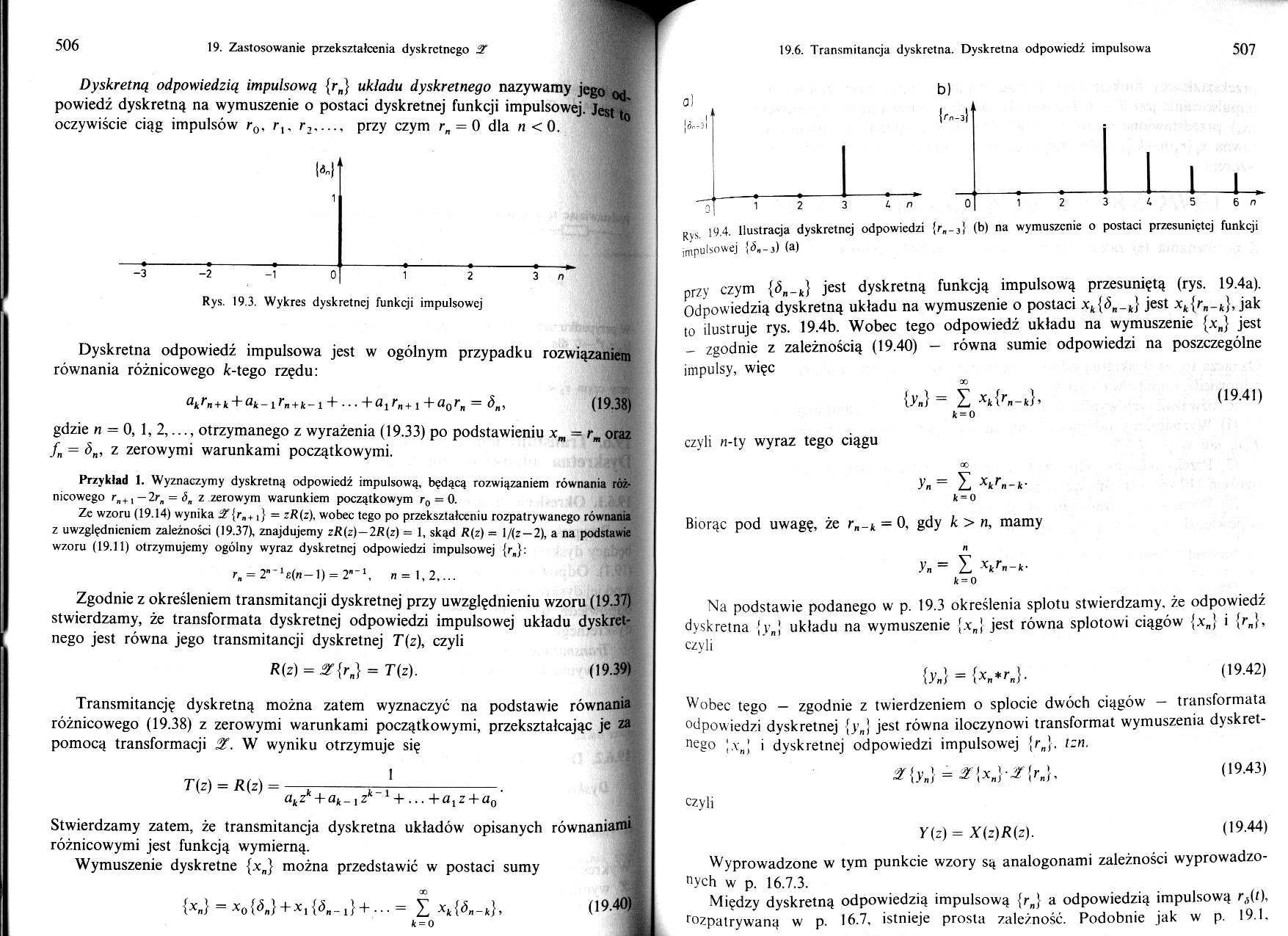
Dyskretną odpowiedzią impulsową {rn} układu dyskretnego nazywamy jego odpowiedź dyskretną na wymuszenie o postaci dyskretnej funkcji impulsowej. Jest to oczywiście ciąg impulsów r0, r,, r,_____ przy czym rn = 0 dla n < 0.
506 19. Zastosowanie przekształcenia dyskretnego $f
-3
N
1
-2-10 12
Rys. 19.3. Wykres dyskretnej funkcji impulsowej

Dyskretna odpowiedź impulsowa jest w ogólnym przypadku rozwiązaniem równania różnicowego k-tego rzędu:
akrn + k+ak-l>"n + k-l + •• • +fllfn + 1 +«orB = (19.38)
gdzie n = 0, 1,2,..., otrzymanego z wyrażenia (19.33) po podstawieniu xm = rm oraz fn — ón, z zerowymi warunkami początkowymi.
Przykład 1. Wyznaczymy dyskretną odpowiedź impulsową, będącą rozwiązaniem równania różnicowego r„+1— 2r„ = <5, z zerowym warunkiem początkowym r0 = 0.
Ze wzoru (19.14) wynika -Z{r„+,} = zR(z), wobec tego po przekształceniu rozpatrywanego równania z uwzględnieniem zależności (19.37), znajdujemy zR(z)—2R(z) = 1, skąd R(z) = l/(z—2), a na podstawie wzoru (19.11) otrzymujemy ogólny wyraz dyskretnej odpowiedzi impulsowej {r„}:
r„ = 2"'łe(n —1) = 2"_1, n=l,2,...
Zgodnie z określeniem transmitancji dyskretnej przy uwzględnieniu wzoru (19.37) stwierdzamy, że transformata dyskretnej odpowiedzi impulsowej układu dyskretnego jest równa jego transmitancji dyskretnej T(z), czyli
R(z) = 3T{rn} = T(z). (19.39)
Transmitancję dyskretną można zatem wyznaczyć na podstawie równania różnicowego (19.38) z zerowymi warunkami początkowymi, przekształcając je za pomocą transformacji W wyniku otrzymuje się
T(z) = R(z) =
1
atz* ak _, zk ~1 -f ... + a, z + a0'
Stwierdzamy zatem, że transmitancja dyskretna układów opisanych równaniami różnicowymi jest funkcją wymierną.
Wymuszenie dyskretne {x„} można przedstawić w postaci sumy
507
19.6. Transmitancja dyskretna. Dyskretna odpowiedź impulsowa
|
. 1' Or-S | | ||||
|
... . |
III. | |||
|
0 |
i 2 |
Z n 0 |
1 2 |
Z 5 6 n |
rvs. 19.4. Ilustracja dyskretnej odpowiedzi (b) na wymuszenie o postaci przesuniętej funkcji
impulsowej j) (a)

przy czym {Ó„_k} jest dyskretną funkcją impulsową przesuniętą (rys. 19.4a). Odpowiedzią dyskretną układu na wymuszenie o postaci jest {/•„_*}, jak
to ilustruje rys. 19.4b. Wobec tego odpowiedź układu na wymuszenie {xn} jest - zgodnie z zależnością (19.40) — równa sumie odpowiedzi na poszczególne impulsy, więc
OD
{y„} = Z xk{rn_k}, (19.41)
k = 0
czyli n-ty wyraz tego ciągu
k' n-k-
y„ = Z x>r.
k = 0
Biorąc pod uwagę, że rn-k = 0, gdy k > n, mamy
n
yn = Z xkrn-k-
Na podstawie podanego w p. 19.3 określenia splotu stwierdzamy, że odpowiedź dyskretna (y„j układu na wymuszenie [.x„j jest równa splotowi ciągów {x„} i {r„},
czyli
{>’„} = (wl- (19.42)
Wobec tego — zgodnie z twierdzeniem o splocie dwóch ciągów' — transformata odpowiedzi dyskretnej (yj jest równa iloczynowi transformat wymuszenia dyskret-
|
nego I |
,v„; i dyskretnej odpowiedzi impulsowej Jrn). izn. | |
|
>y (,, ). _ » i y \. y i• "Z (-'■Mj ~Z i'nh |
(19.43) | |
|
czyli |
Y (z) = X(z)R(z). |
(19.44) |
Wyprowadzone w tym punkcie wzory są analogonami zależności wyprowadzonych w p. 16.7.3.
Między dyskretną odpowiedzią impulsową {rn} a odpowiedzią impulsową r,(f), rozpatrywaną w p. 16.7, istnieje prosta zależność. Podobnie jak w p. 19.1.
Wyszukiwarka
Podobne podstrony:
251 (16) 502 19. Zastosowanie przekształcenia dyskretnego odstępie At. Jednym z najprostszych sposob
246 (22) 19. ZASTOSOWANIE PRZEKSZTAŁCENIA DYSKRETNEGO19.1. Wiadomości podstawowe W dotychczasowych r
247 (21) 494 19. Zastosowanie przekształcenia dyskretnego 2 Ciąg {/„} jest nazywany oryginałem dyskr
248 (23) 496 19. Zastosowanie przekształcenia dyskretnego 3 Zgodnie z określeniem
249 (18) 498 19. Zastosowanie przekształcenia dyskretnego X Splotem dwóch ciągów {Jn} i {gn} nazywam
250 (18) 500 19. Zastosowanie przekształcenia dyskretnego 2t a następnie dzieląc licznik przez miano
252 (19) 504 19. Zastosowanie przekształcenia dyskretnego % Przykład 2. Wyznaczymy napięcia Uh (n =
254 (19) 508 19. Zastosowanie przekształcenia dyskretnego 2 przekształcamy funkcję rg(t) w ciąg impu
286 (16) 572 572 22. Zastosowanie przekształcenia Fouriera Rys. 22.6. Impuls trójkątny Funkcję z rys
288 (16) 576 22. Zastosowanie przekształcenia Fouriera biegunów. W dalszych rozważaniach ograniczymy
290 (16) 580 22. Zastosowanie przekształcenia Fouriera Przekształcenie Fouriera ma pewne zalety w po
281 (16) 22. ZASTOSOWANIE PRZEKSZTAŁCENIA FOURIERA22.1. Przekształcenie Fouriera. Gęstość widmowa W
img239 (16) Niektóre drobnoustroje mogą przekształcać aminokwasy zarówno na drodze dcaminacji, jak i
konspekt (16) kategoriach ruchu zastosował do człowieka i społeczeństwa. Z powodu poglądów polityczn
skrypt031 (2) 31 a (2.18) (2.19) Abc 0,1 = i Inl l+ -a v y) Wyrażenie 2.19 można p
Image5 16. Stroiki - ich zastosowanie, próby podstawowe w badaniu. 17.
więcej podobnych podstron