462 (13)
462
PRZYKŁAD 15.3
RYS. 15.4
15. Ruch płaski ciała sztywnego
zaś dla drugiego
P2
-XOr — Pi sin fi — S
8
Io2<h — Sr2
Dopiszemy jeszcze równanie więzów. Gdyby nić nie mieszczała się względem klina, punkt A byłby chwilo^ środkiem obrotu dla pierwszego walca i wtedy ip, = r • czyli xq\ = ri ip. Nić uzyska jednak pewne nieznane p^' spieszenie a. Załóżmy, że będzie ono skierowane jak ^ rys. 15.3. Zatem punkt A ma przyspieszenie równe co ^ wartości a, o zwrocie przeciwnym do zwrotu X\. W zwią^ z tym przyspieszenie środka 0\ będzie równe
x0l = r\ip\ -a
a punktu 02
xo2 — r2<h + a
W wyniku rozwiązania układu tych sześciu równań o sześciu niewiadomych dostajemy
P2 sin fi — Pi sin a a==g Pi + P2
Pi ^2(sin ot + sin fi)
K| 3(Pi + P2)
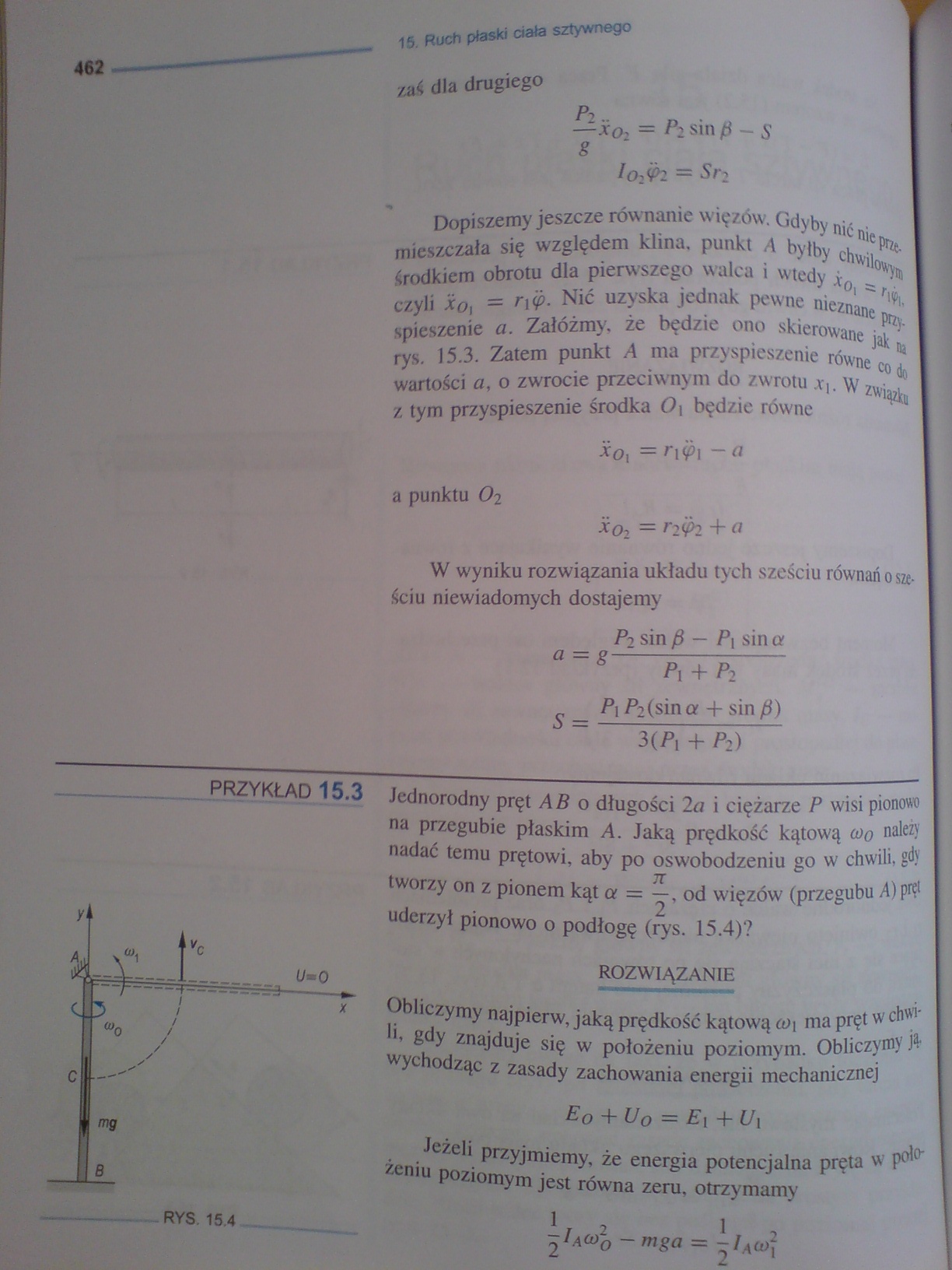
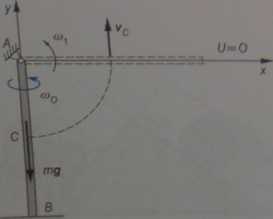
Jednorodny pręt AB o długości 2a i ciężarze P wisi pionowo na przegubie płaskim A. Jaką prędkość kątową too należy nadać temu prętowi, aby po oswobodzeniu go w chwili, gdy tworzy on z pionem kąt a = —, od więzów (przegubu A) pręt uderzył pionowo o podłogę (rys. 15.4)?
ROZWIĄZANIE
Obliczymy najpierw, jaką prędkość kątową a>\ ma pręt w chwili, gdy znajduje się w położeniu poziomym. Obliczymy % wychodząc z zasady zachowania energii mechanicznej
E0 ■+■ Uo = + U\
Jeżeli przyjmiemy, że energia potencjalna pręta w położeniu poziomym jest równa zeru, otrzymamy
1,2 1 „ ,
-7ag>0 — mga = -1A to\
Wyszukiwarka
Podobne podstrony:
465 (13) 465 15. Ruch płaski ciała sztywnego po rozwiązaniu tego układu równań dostajemy PQ<Q + *
472 (13) 472 15. Ruch płaski ciała sztywnego ROZWIĄZANIE Wiadomo, że w czasie toczenia się bez pośli
463 (11) 463 15 Ruch płaski ciała sztywnego stąd po podstawieniu /.1 -ma2 3 obliczamy2
466 (10) 466 mig + 2P 01 = — *1 = 15. Ruch płaski ciała sztywnego . m w obu niciach. Dla jakiego sto
473 (6) 15. Ruch plaski ciała sztywnego ROZWIĄZANIE Położenie belki jednoznacznie możemy opisać za p
464 (10) 464 RYS. 15.5. 15. Ruch płaski dała sztywnego ROZWIĄZANIE Wiemy ze statyki, że w przypadku
461 (14) 15. Ruch płaski data sztywnego 461 Na środek walca działa siła F. Praca sił zewnętrznych zg
469 (6) — cosąp. 15. Ruch płaski dała sztywnego gtadkte. pręt zaczyna się zsuwać w dół bez prędkości
471 (11) 15. Ruch płaski dała sztywnego Z zasady równowartości energii kinetycznej i pracy dostaniem
474 (10) 474 15. Ruch płaski dała sztywnego a momenty bezwładności Ii = —mjrf Chwilowy środek obrotu
476 (10) 476 Zadanie 15.16 15. Ruch pliki ciała utywmgo Jednorodny cienkoicieims cylinder u promieni
460 (13) 15Ruch płaski ciała sztywnego Równania różniczkowe ciała w ruchu płaskim mają posiać mxc =
skanuj0399 PRZYKŁAD 15.1. Obliczyć hamulec jednoklockowy (wg rys. 15.2a), w którym moment obrotowy b
IMG151 151 Rye. l2.1*ł. Wykres wektorowy do obvodu t ryaunku 12.13 Rya. 12.15* Schemat obwodu do prz
IMG194 194 Rys. 15.11. Rozwiążecie przykładu 15.6.6 Zadania 15.6.7. Obliczyć stałe czasowe obwodów (
skanuj0399 PRZYKŁAD 15.1. Obliczyć hamulec jednoklockowy (wg rys. 15.2a), w którym moment obrotowy b
Przykład 1: Niech n = 15. Wtedy 15 = {1,2, 4, 7, 8, 11,13, 14). fl5 = <l>(15) =
więcej podobnych podstron