HPIM0862
8. Urządzenia chwytające robotów przemysłowych
Trzymanie obiektu w trakcie trwania czynności manipulacyjnych może by$ związane z takimi operacjami, jak:
- kontrola obecności obiektu w urządzeniu chwytającym,
- kontrola poprawności zamocowania obiektu w chwytaku,
- regulacja siły chwytu.
Uwolnienie obiektu manipulacji w miejscu docelowym może być związane z
- koniecznością rozpoznania miejsca, w którym należy umieścić obiekt manipulacji (a więc wykonania ewentualnych przemieszczeń korekcyj. nych),
- koniecznością pomiaru i ewentualnie sterowania sił i momentów po. wstających na skutek zetknięcia się trzymanego obiektu z podłożeni.
W końcowej fazie uwolnienia następuje zmniejszenie wartości siły chwytu i przemieszczenie mechanizmu wykonawczego, powodującego rozwarcie koń. cówek chwytnych.
8.2. Klasyfikacja i charakterystyka urządzeń chwytających
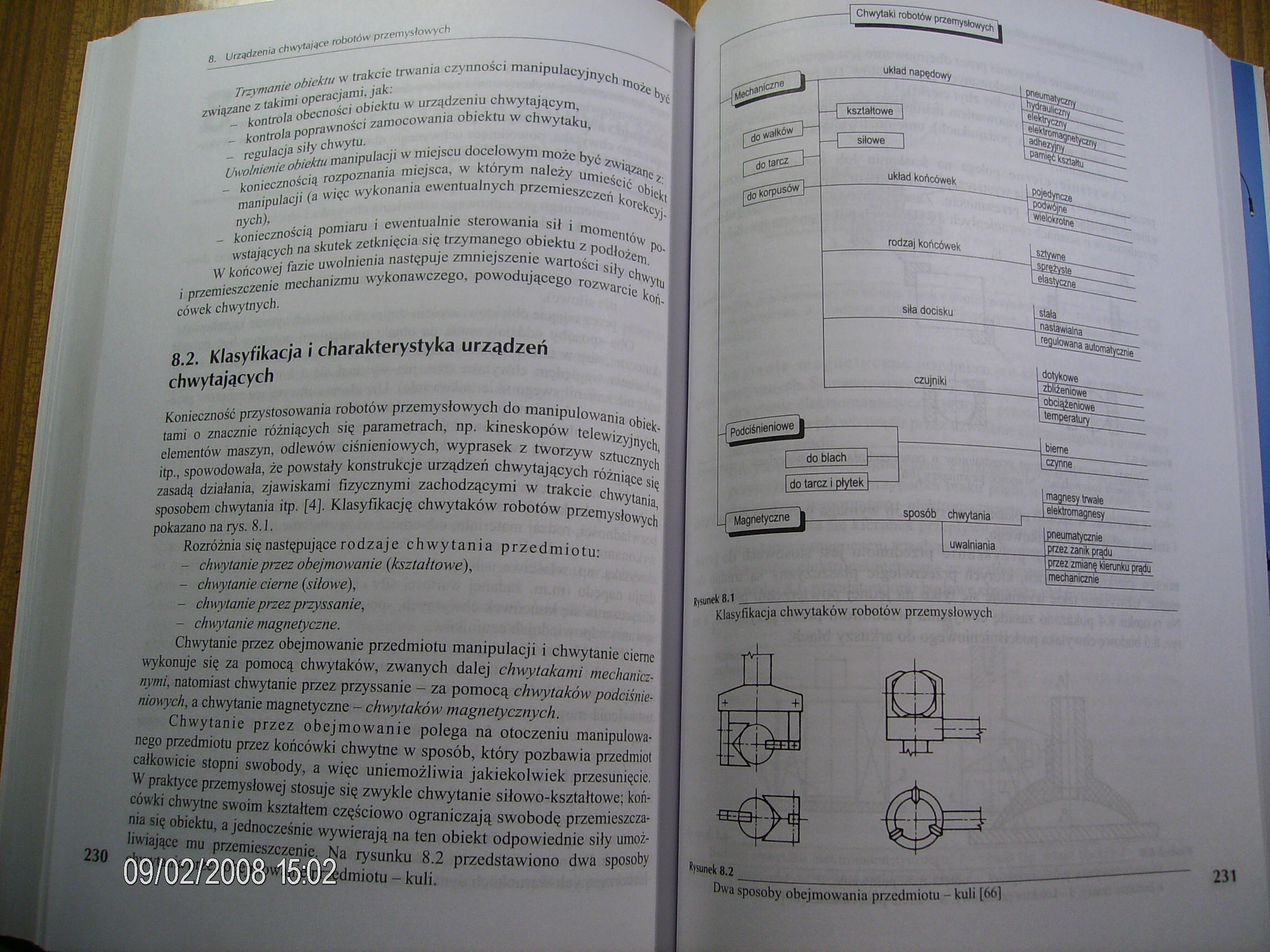
Konieczność przystosowania robotów przemysłowych do manipulowania obiektami o znacznie różniących się parametrach, np. kineskopów telewizyjnych, elementów maszyn, odlewów ciśnieniowych, wyprasek z tworzyw sztucznych itp., spowodowała, że powstały konstrukcje urządzeń chwytających różniące się zasadą działania, zjawiskami fizycznymi zachodzącymi w trakcie chwytania, sposobem chwytania itp. [4]. Klasyfikację chwytaków robotów przemysłowych pokazano na rys. 8.1.
Rozróżnia się następujące rodzaje chwytania przedmiotu:
- chwytanie przez obejmowanie |kształtowe),
- chwytanie cierne (siłowe),
- chwytanie przez przyssanie,
i chwytanie magnetyczne.
Chwytanie przez obejmowanie przedmiotu manipulacji i chwytanie cieme wykonuje się za pomocą chwytaków, zwanych dalej chwytakami mechanicznymi, natomiast chwytanie przez przyssanie - za pomocą chwytaków podciśnieniowych, a chwytanie magnetyczne | chwytaków magnetycznych.
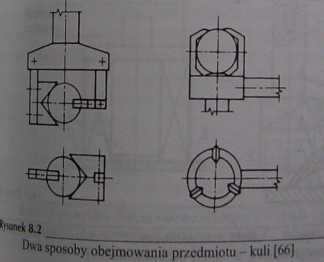
Chwytanie przez obejmowanie polega na otoczeniu manipulowanego przedmiotu przez końcówki chwytne w sposób, który pozbawia przedmiot całkowicie stopni swobody, a więc uniemożliwia jakiekolwiek przesunięcie. W praktyce przemysłowej stosuje się zwykle chwytanie siłowo-kształtowe; końcówki chwytne swoim kształtem częściowo ograniczają swobodę przemieszczania się obiektu, a jednocześnie wywierają na ten obiekt odpowiednie siły umożliwiające mu przemieszczenia Na rysunku 8.2 przedstawiono dwa sposoby
- kuli.

tysunek * 11 ■ ;——----.
Klasyfikacja chwytaków robotów przemysłowych
Wyszukiwarka
Podobne podstrony:
HPIM0867 8. Urządzenia chwytające robotów przemysłowych pracę chwytaka (zmniejszenie sił tarcia, sym
HPIM0861 8Urządzenia chwytającJ robotów przemysłowych! Niezbędnym wypouużeniem robolu przemysłowego
HPIM0871 8. Urządzenia chwytające robolów przemysłowych a wartość kąta fi— z układu równań acos(a —
DSC00733 (6) 09:10 Rys. Elastyczny system wymiany urządzeń chwytających robotów przemysłowych: a) po
HPIM0827 Oi Napędy robotów przemysłowych Stosowanie napędu pneumatycznego w budowie jednostek kinema
HPIM0891 10. Zastosowania robotów przemysłowych Rysunek -—----— Analiza
HPIM0897 ■ 10. Zaścósovvahia robotów przemysłowych Rysunek
HPIM0898 10. Zastosowania robotów przemysłowych 10. Zastosowania robotów przemysłowych 5 Rysunek
HPIM0811 5. Sterowanie robotów przemysłowych Tablica 5.1. Funkcje spełnione przez urządzenia elektry
P1080294 6. Etektory robotów przemysłowych spieszeń. Poprawne uchwycenie oznacza unieruchomienie obi
P1080359 (2) 12. Badanie dokładności robotów przemysłowych geometrycznych jest wyznaczana odległość
13248 P1080299 8. Efektory robotów przemysłowych 01O5±O,2 Rysunek 8.6_ Chwytak do tarcz robola AM 80
HPIM0760 2. Definicje i klasyfikacja robotów przemysłowych Według Moreckicgo [62] „robot to urządzen
HPIM0803 5. Sterowanie robotów przemysłowych — układów sterować Podstawową, najbardziej rozpowszechn
HPIM0813 S. Sterowanie robotów przemysłowych do jednostki logicznej, w której informacje o wzajemnym
HPIM0814 5. Sterowanie robotów przemysłowych 5. Sterowanie robotów przemysłowych Architektura
HPIM0819 5. Sterowanie robotów przemysłowych Tablica S.1 icd.) I Nr instrukcji Typ
HPIM0821 5, Sterowanie robotów przemysłowych Dlatego też nawigacja wirtualna musi być łączona z inny
HPIM0822 5. Sterowanie robotów przemysłowych gami wszystkich komórek wolnych i zajętych. Komórce poc
więcej podobnych podstron