HPIM0867

8. Urządzenia chwytające robotów przemysłowych pracę chwytaka (zmniejszenie sił tarcia, symetryczny ruch końcówek). np. wodzik powinien pracować na obu powierzchniach jarzma-krzywki u, 'vi<J zakresie przemieszczeń końcówek chwytnych. Na wartość siły chwyty ^ występowanie histerezy przemieszczeń końcówek chwytnych niekor> ; wpływa luz w przekładniach zębatych oraz zmienne tarcie na powiej?'5Si stykających się zębów.
8.4.3. Układy wykonawcze chwytaków :hwytnych może cyc rożna - stanaaraowy cnwytaK ma awte^mmeśżćżon^ ciwlcgle, końcówki chwytne. Rzadziej stosuje się chwytaki z jedną ruch końcówką chwytną (druga nicmchoma. albo jest to chwytak typu hako\vcnn\°,vi z trzema końcówkami chwytnymi (przeznaczone głównie do chwytania
R\suneki
Uchani
'ttnych
(.owa^ych kształtach). Ze względu na sposób oddziaływani, I. ł yliplj na powierzchnię obiektu wyróżnia się chwytaki do cl 1 ^^wek ' ia powierzchnię zewnętrzną obiektu manipulacji, 1Wytania:
. zii powierzchnię wewnętrzną obiektu, zn powierzchnię zewnętrzną lub wewnętrzną.
N® tysunku 8.8 pokazano konstrukcję chwytaka do wałków robotach AM 80 prod. Vukov w PreSovie. Jest to chwytak* Doied^* dcm hydraulicznym, ze sztywnymi końcówkami wymiennymi dośm?
Elementem wykonawczym chwytaka są końcówki chwytne. Liczba | chwytnych może być różna - standardowy chwytak ma dwie, umieszczon* N
tół90 mm oraz r/ = 80+120 mm.
0105*0.2
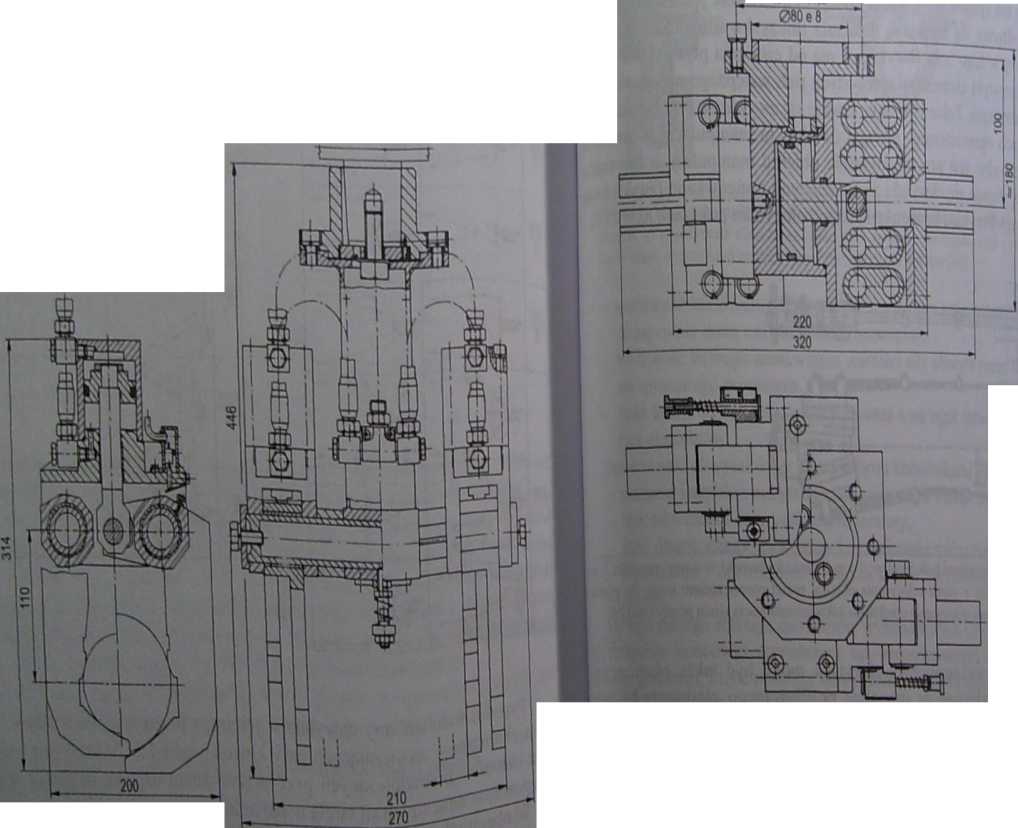
Chwytak do wałków robota AM 80
I F
fok 19
Chwytak do tarcz robota AM 80
Na rysunku 8.9 pokazano konstrukcję podwójnego chwytaka z napędem pneumatycznym do przedmiotów klasy tarcza, stosowanego także w robotach Chwytak jest dostosowany do chwytania przedmiotów za powierzchnię
Wyszukiwarka
Podobne podstrony:
HPIM0862 8. Urządzenia chwytające robotów przemysłowych Trzymanie obiektu w trakcie trwania czynnośc
HPIM0871 8. Urządzenia chwytające robolów przemysłowych a wartość kąta fi— z układu równań acos(a —
HPIM0827 Oi Napędy robotów przemysłowych Stosowanie napędu pneumatycznego w budowie jednostek kinema
HPIM0891 10. Zastosowania robotów przemysłowych Rysunek -—----— Analiza
HPIM0897 ■ 10. Zaścósovvahia robotów przemysłowych Rysunek
HPIM0898 10. Zastosowania robotów przemysłowych 10. Zastosowania robotów przemysłowych 5 Rysunek
HPIM0861 8Urządzenia chwytającJ robotów przemysłowych! Niezbędnym wypouużeniem robolu przemysłowego
DSC00733 (6) 09:10 Rys. Elastyczny system wymiany urządzeń chwytających robotów przemysłowych: a) po
13248 P1080299 8. Efektory robotów przemysłowych 01O5±O,2 Rysunek 8.6_ Chwytak do tarcz robola AM 80
HPIM0811 5. Sterowanie robotów przemysłowych Tablica 5.1. Funkcje spełnione przez urządzenia elektry
13248 P1080299 8. Efektory robotów przemysłowych 01O5±O,2 Rysunek 8.6_ Chwytak do tarcz robola AM 80
8. Budowa i podstawy projektowania chwytaków i urządzeń peryferyjnych robotów
P1080299 8. Efektory robotów przemysłowych 01O5±O,2 Rysunek 8.6_ Chwytak do tarcz robola AM 80 Rysun
P1080309 8. Efeklory robotów przemysłowych Chwytaki magnetyczne są stosowane do przenoszenia perforo
8. Budowa i podstawy projektowania chwytaków i urządzeń peryferyjnych robotów
53534 P1080309 8. Efeklory robotów przemysłowych Chwytaki magnetyczne są stosowane do przenoszenia p
P1080380 13. Zastosowania robotów przemysłowych dzięki elastycznemu systemowi wymiany chwytaków, dop
8. Budowa i podstawy projektowania chwytaków i urządzeń peryferyjnych robotów
więcej podobnych podstron