82369
Część 1 5. TEMPERATURA, OSIADANIA PODÓRI BŁĘDY MONTAŻU W RÓWNANIU... 24
W kratownicy tej sztywność pręt ów £4 jest stała, nie występują także siły tnące i momenty zginające w prętach (wynika to z definicji kratownicy). Pręty pasa górnego oznaczono literą G, pasa dolnego - D. kizyźulce - K oraz słupki jako S. Spójrzmy, jak będzie wyglądało ogólne równanie pracy wirtualnej dla prętów powyższej kratownicy:
RA
Wynika z tego. że obliczenie przemieszczenia punktu sprowadza się do pomnożenia siły od obciążenia wirtualnego w danym pręcie przez siłę panującą w tym pręcie wywołaną obciążeniem rzeczywistym i długości tego pręta. Następnie sumujemy wszystkie iloczyny i dzielimy wynik pizez sztywność EA. Otrzymana wielkość jest rzeczywistym przemieszczeniem danego punktu.
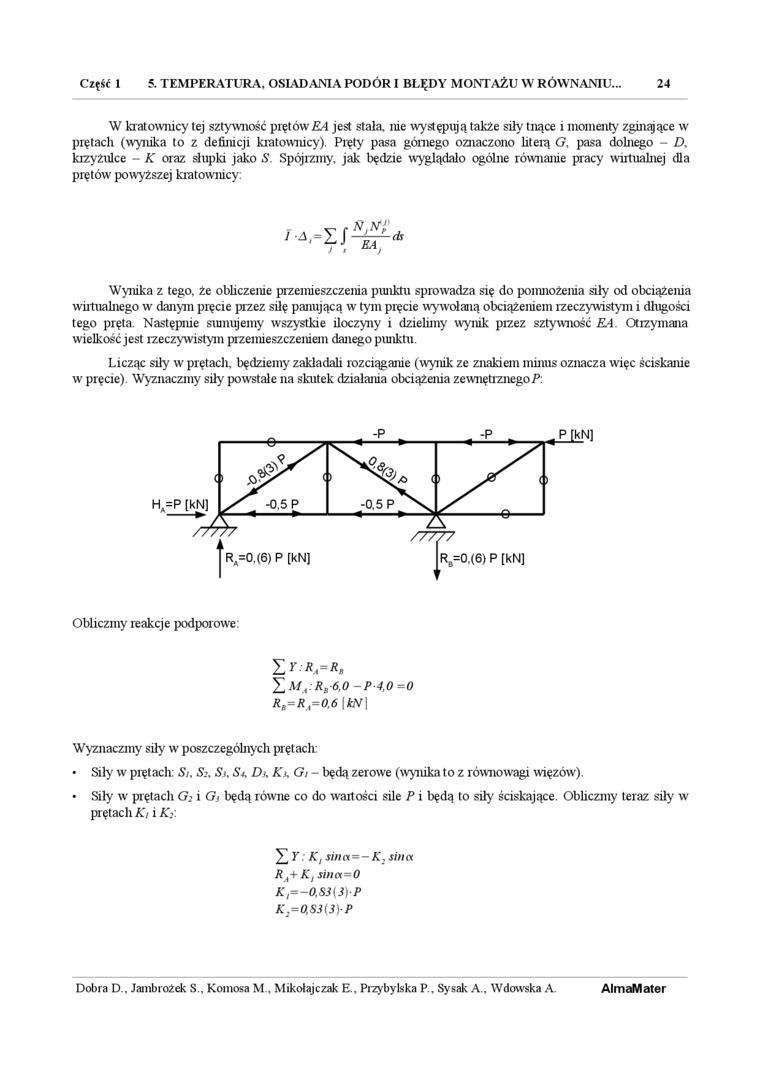
Licząc siły w prętach, będziemy zakładali rozciąganie (wynik ze znakiem minus oznacza więc ściskarue w pręcie). Wyznaczmy siły powstałe na skutek działania obciążeiua zewnętrznegoP:
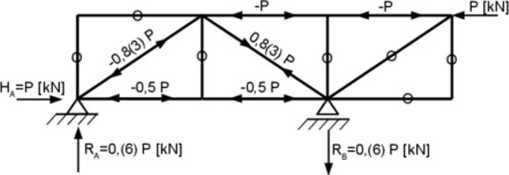
Obliczmy reakcje podporowe:
T.Y:Ra-R,
1 a Rb 6 0 -P 4,0=0 R„=RA=0,6 |kN\
Wyznaczmy siły w poszczególnych prętach:
• Siły w piętach Si. S:. Sj. Si. D<. Ks. Gi - będą zerowa (wynika to z równowagi więzów).
• Siły w* prętach G; i G> będą równe co do wartości sile P i będą to siły ściskające. Obliczmy teraz siły w pi ętach Ki i K:.
Y.Y Kj sin(x=- K: sina
Ra+ K, sincx=0 K,= -0,83(3)P K:=0,S3(3)P
AlmaMater
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
Wyszukiwarka
Podobne podstrony:
Część 1 5. TEMPERATURA, OSIADANIA PODÓRI BŁĘDY MONTAŻU W RÓWNANIU... 16 Aby
Część 1 5. TEMPERATURA, OSIADANIA PODÓRI BŁĘDY MONTAŻU W RÓWNANIU... 7 Całka
Część 1 5. TEMPERATURA, OSIADANIA PODÓRI BŁĘDY MONTAŻU W
Część 1 5. TEMPERATURA, OSIADANIA PODÓRI BŁĘDY MONTAŻU W
Część 1 5. TEMPERATURA, OSIADANIA PODÓRI BŁĘDY MONTAŻU W
Część 1 5. TEMPERATURA, OSIADANIA PODÓRI BŁĘDY MONTAŻU W
Część 1 5. TEMPERATURA, OSIADANIA PODÓR I BŁĘDY MONTAŻU W
Część 1 5. TEMPERATURA, OSIADANIA PODÓR I BŁĘDY MONTAŻU W
skan0137 140 Roztwory i równowagi fazowe Równanie (4.24) jest nazywane prawem Van’t Hoffa. Dla roztw
skanuj0047 5 Przepływ energii 125 Le P LE = - V Przepisując równanie 7.7. i ostatecznie równanie 7.2
7. FUNKCJA KWADRATOWA 1. Rozwiąż równania: a) * =24 b) e) 7x‘=3,5x f> 2.
PICT0096 Wymiarowanie Aby wyznaczyć niewiadome xeff i As1, do dyspozycji są w dalszym ciągu równania
zad1a tif Temperaturę powierzchni ścianki oblicza się z równania Q = k ■ At ■ D = xk(ts-t) (D + 2S)
Część 2 16. ZADANIA POWTÓRKA 22 Zapisując równanie równowagi monieniów w węźle 1 otrzymamy
PICT0090 Wymiarowanie Przy wymiarowaniu korzysta się również z równań (24) i (25) lub (26) fcd bxeff
Obraz0015 U) Chcąc obliczyć ciepło przemiany izobarycznej dla guzów pófdoskonałycii, niik/,y w równa
P1070065 150 Część II. Rozwiązania I odpowiedzi Podstawiając do równania momentów wyznaczone wartośc
więcej podobnych podstron