6125495274
15
Identyfikacja i rekonstrukcja elementów rurowych w instalacjach przemysłowych na potrzeby inwentaryzacji
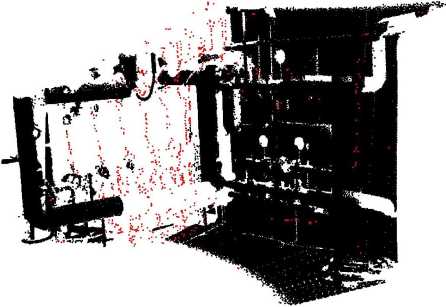
Rys. 5.2. Filtracja sceny pomiarowej
Punkty oznaczone na czerwono zakwalifikowano jako szum, w efekcie chmura po filtracji zawierała 211 942 punkty. W tym przypadku zastosowanie drugiej metody filtracji opracowanej w pracy bazującej na intensywności nie jest dobrym rozwiązaniem gdyż punkty pomiarowe znajdujące się na elementach połyskliwych zakwalifikowane zostały jako szum co było zjawiskiem niepożądanym.
Następnie zgodnie z zaproponowanym algorytmem, w kolejnym kroku podzielono chmurę punktów na niezależne linie pomiarowe. Wykonanie tego kroku, dla podanej sceny, przedstawiono na rys. 5.3. W wyniku działania tego etapu uzyskano 1669 niezależnych segmentów reprezentujących kolejne obroty zwierciadła skanera. Rysunek 5.4 przedstawia całą scenę pomiarową przetransformowaną do układu XZ w celu wykorzystania Transformaty Hougha do segmentacji łuków i odcinków. W rzeczywistości oprogramowanie nie obraca całej sceny do jednej płaszczyzny, ale pracuje na kolejnych liniach.
Wyszukiwarka
Podobne podstrony:
Identyfikacja i rekonstrukcja elementów rurowych w instalacjach przemysłowych na potrzeby
10 Identyfikacja i rekonstrukcja elementów rurowych w instalacjach przemysłowych na potrzeby
11 Identyfikacja i rekonstrukcja elementów rurowych w instalacjach przemysłowych na potrzeby
Identyfikacja i rekonstrukcja elementów rurowych w instalacjach przemysłowych na potrzeby inwentaryz
Identyfikacja i rekonstrukcja elementów rurowych w instalacjach przemysłowych na potrzeby inwentaryz
Identyfikacja i rekonstrukcja elementów rurowych w instalacjach przemysłowych na potrzeby inwentaryz
Identyfikacja i rekonstrukcja elementów rurowych w instalacjach przemysłowych na potrzeby
Identyfikacja i rekonstrukcja elementów rurowych w instalacjach przemysłowych na potrzeby inwentaryz
Identyfikacja i rekonstrukcja elementów rurowych w instalacjach przemysłowych na potrzeby inwentaryz
Identyfikacja i rekonstrukcja elementów rurowych w instalacjach przemysłowych na potrzeby inwentaryz
Identyfikacja i rekonstrukcja elementów rurowych w instalacjach przemysłowych na potrzeby inwentaryz
Identyfikacja i rekonstrukcja elementów rurowych w instalacjach przemysłowych na potrzeby inwentaryz
Identyfikacja i rekonstrukcja elementów rurowych w instalacjach przemysłowych na potrzeby inwentaryz
Identyfikacja i rekonstrukcja elementów rurowych w instalacjach przemysłowych na potrzeby inwentaryz
Identyfikacja i rekonstrukcja elementów rurowych w instalacjach przemysłowych na potrzeby
Identyfikacja i rekonstrukcja elementów rurowych w instalacjach przemysłowych na potrzeby
Identyfikacja i rekonstrukcja elementów rurowych w instalacjach przemysłowych na potrzeby
Identyfikacja i rekonstrukcja elementów rurowych w instalacjach przemysłowych na potrzeby inwentaryz
Identyfikacja i rekonstrukcja elementów rurowych w instalacjach przemysłowych na potrzeby
więcej podobnych podstron