
1
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny systemu dyskretnego
System dyskretny
to system, w którym zbiór
rozpatrywanych wartości argumentu t jest dyskretny i
chociażby część współrzędnych, albo też oddziaływań, jest
ciągiem impulsów.
Systemy dyskretne
Systemy ciągło-dyskretne
Systemy dyskretne
tylko urządzenia dyskretne
np. komputery, filtry cyfrowe
elementy ciągłe i dyskretne
np. układ ciągły z regulatorem
cyfrowym
2
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
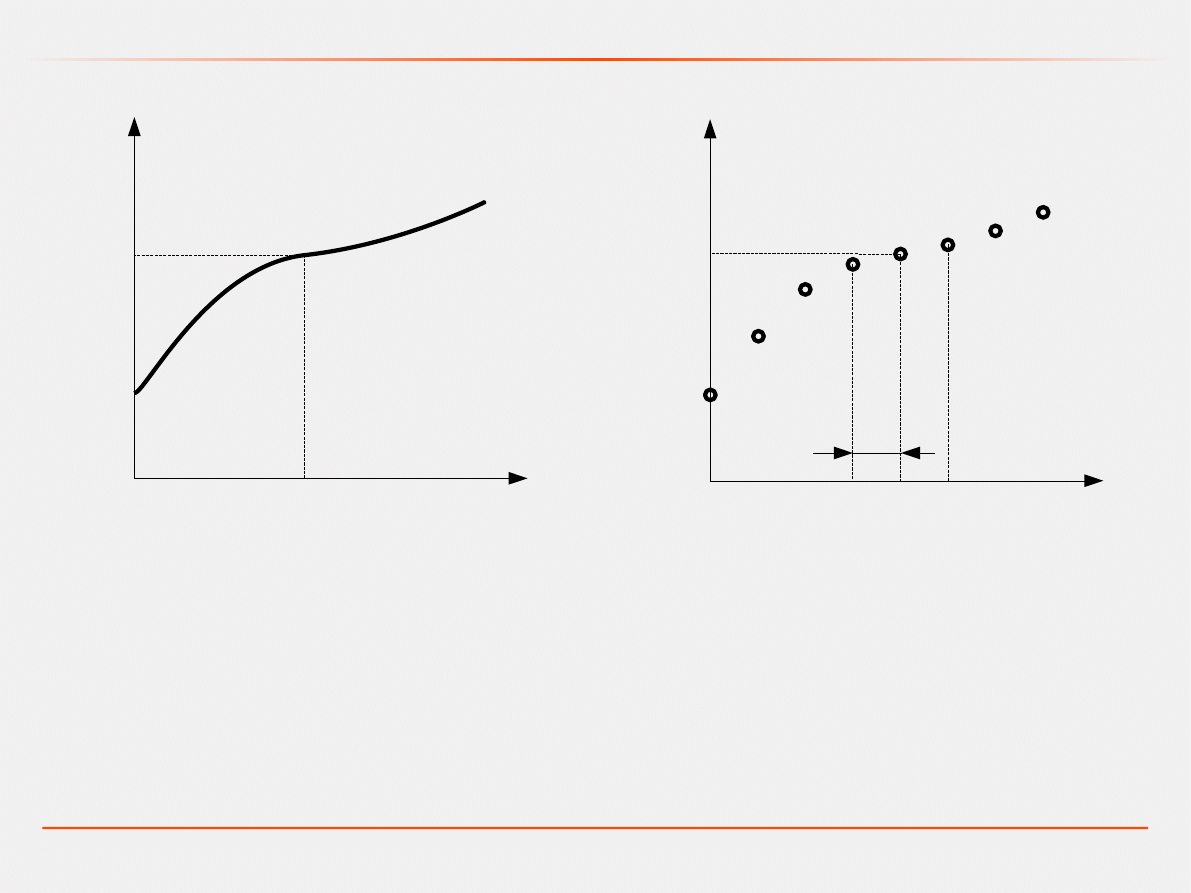
Model dynamiczny systemu dyskretnego
t
x(t)
t
1
x(t
1
)
t
x(t)
k
x(k)
k+1
k-1
T
model ciągły
model dyskretny (impulsowy)
T – czas próbkowania
Proces przekształcenia sygnału ciągłego w dyskretny nazywamy
kwantowaniem
.
3
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
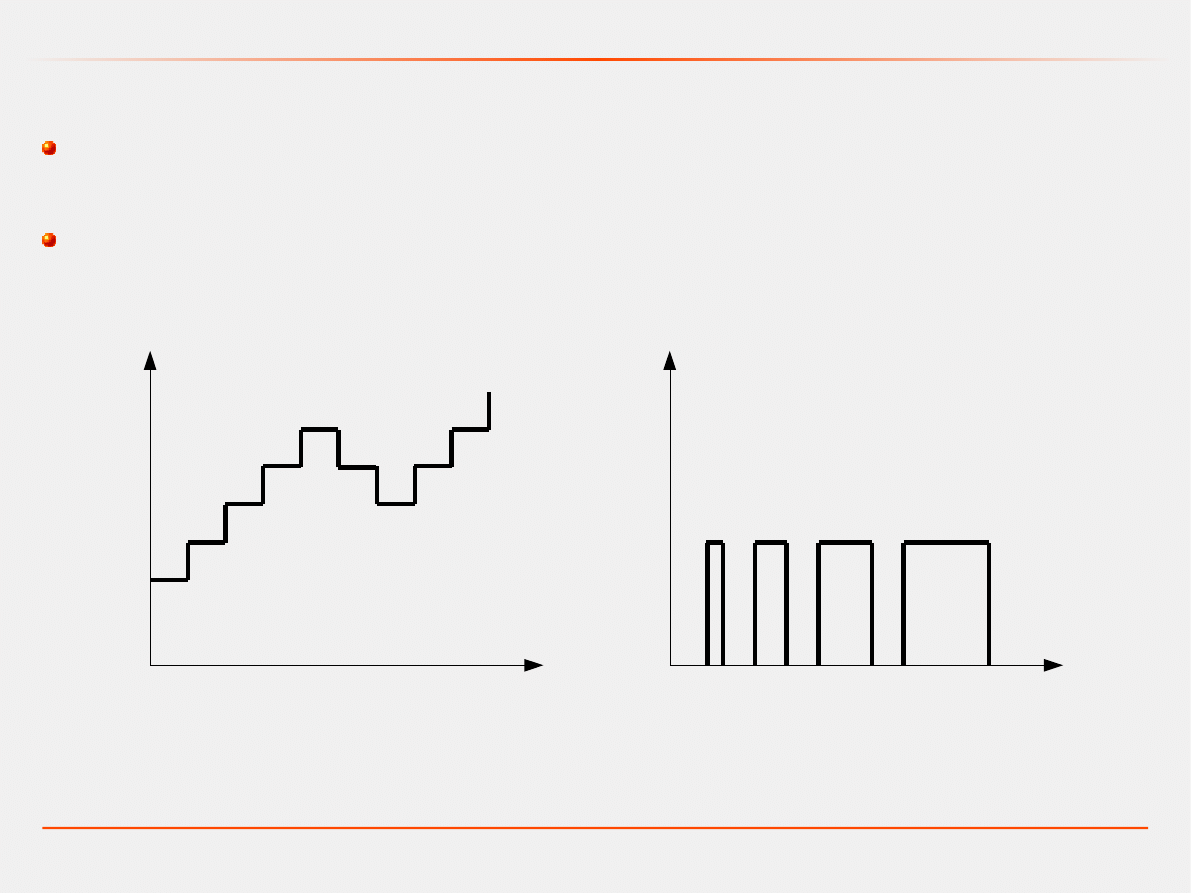
Model dynamiczny systemu dyskretnego
model kwantowy
- zmienne modelu przyjmują tylko określone
wartości,
model skończony
- zmienne modelu przyjmują tylko skończoną
liczbę wartości,
t
x(t)
model kwantowy
t
x(t)
model skończony
4
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny systemu dyskretnego
Przykład: Sterowanie prędkością obrotową silnika elektrycznego –
układ ciągły
WZMACNIACZ
TACHOMETR
+
-
SILNIK
prędkość
napięcie
napięcie
zadające
Z
y*(t)
prędkość wału
pomierzona
prędkość wału
e(t)
y
0
(t)
y*
t
y
t
y(t)
e
t
y
0
t
z
t
Tachometr – prądnica, której wał połączony jest z wałem silnika,
napięcie tej prądnicy jest proporcjonalne do prędkości obrotowej
5
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny systemu dyskretnego
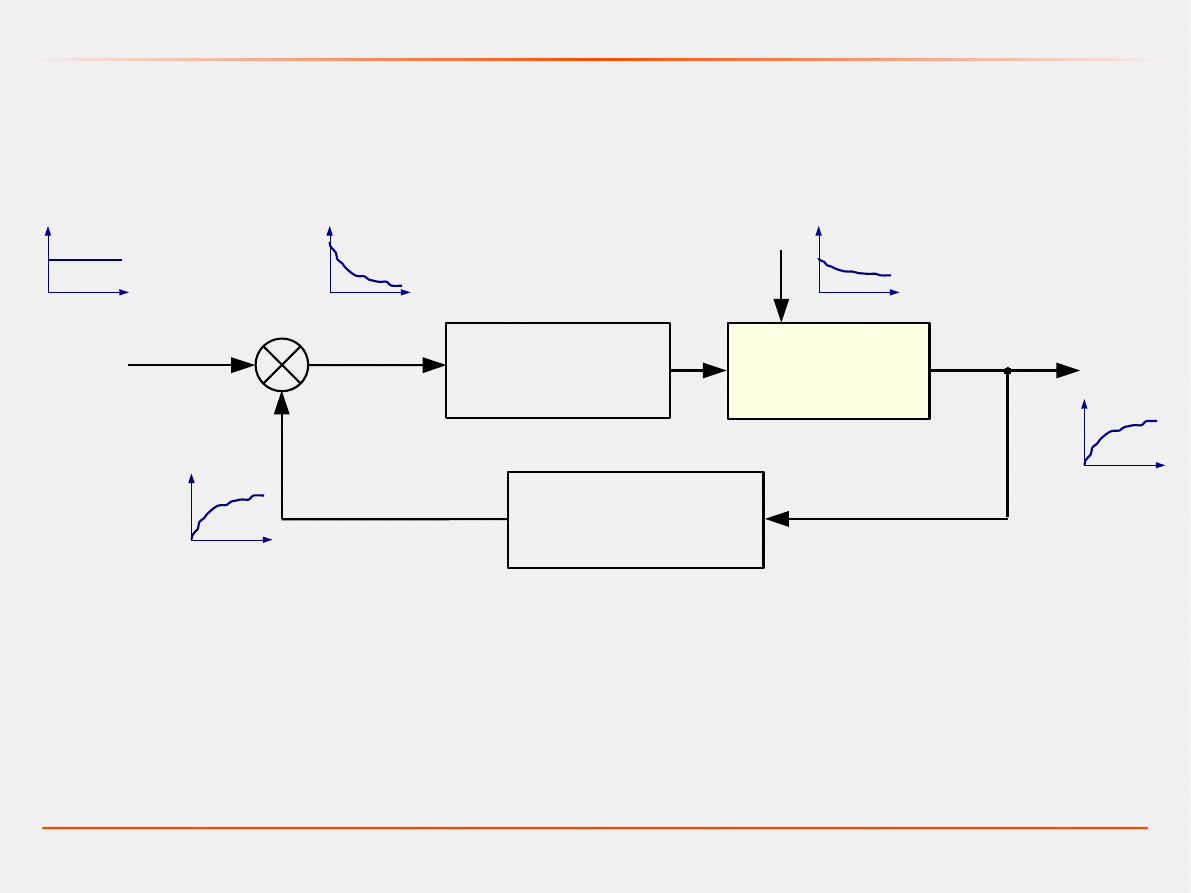
Przykład: Sterowanie prędkością obrotową silnika elektrycznego –
układ ciągły-dyskretny
TACHOMETR
+
-
prędkość
napięcie
napięcie
Z
y*(t)
prędkość wału
pomierzona
prędkość wału
e(t)
y
0
(t)
y*
t
y
t
y(t)
e
t
y
0
t
z
t
A / D
Komputer
D / A
Wzmacniacz
SILNIK
f(t)
p(t)
r(t)
f
t
p
t
r
t
6
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
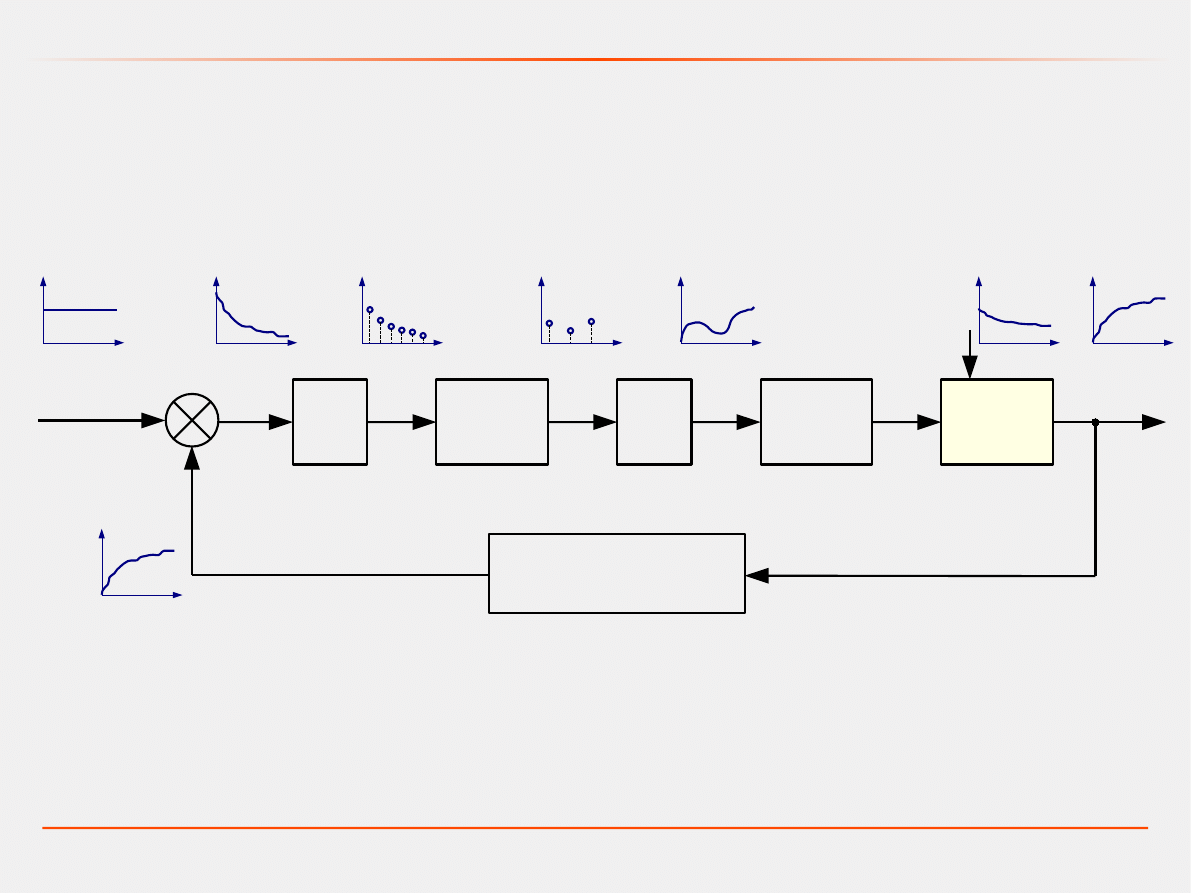
Model dynamiczny systemu dyskretnego
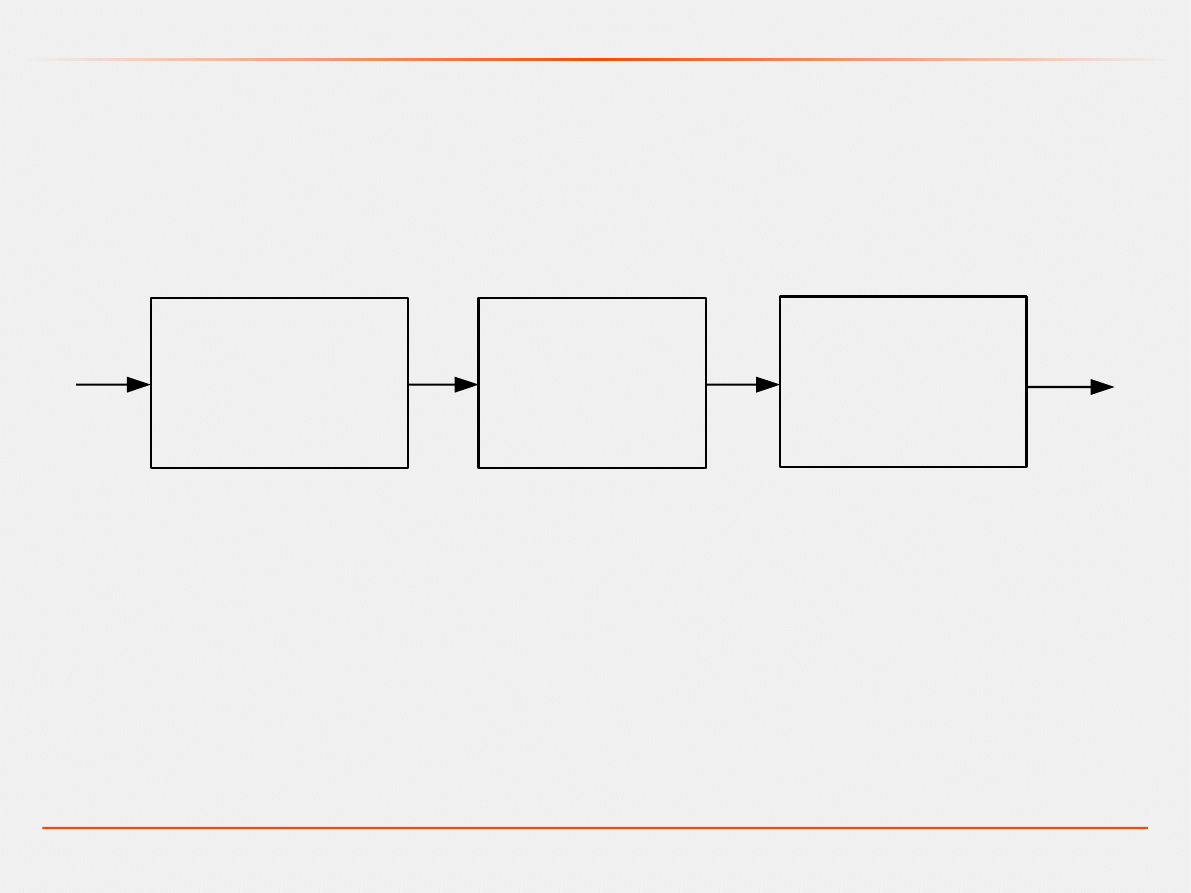
Konwersja sygnałów
e(t)
●
Opóźnienie konwersji
●
Błąd kwantyzacji
f(t)
●
Czas obliczeń
●
Błąd kwantyzacji
p(t)
●
Opóźnienie konwersji
●
Błąd aproksymacji
r(t)
A/D
KOMPUTER
D/A
Czas próbkowania nie może być krótszy od sumy czasu konwersji
przetwornika A/D i czasu obliczeń komputera.
7
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
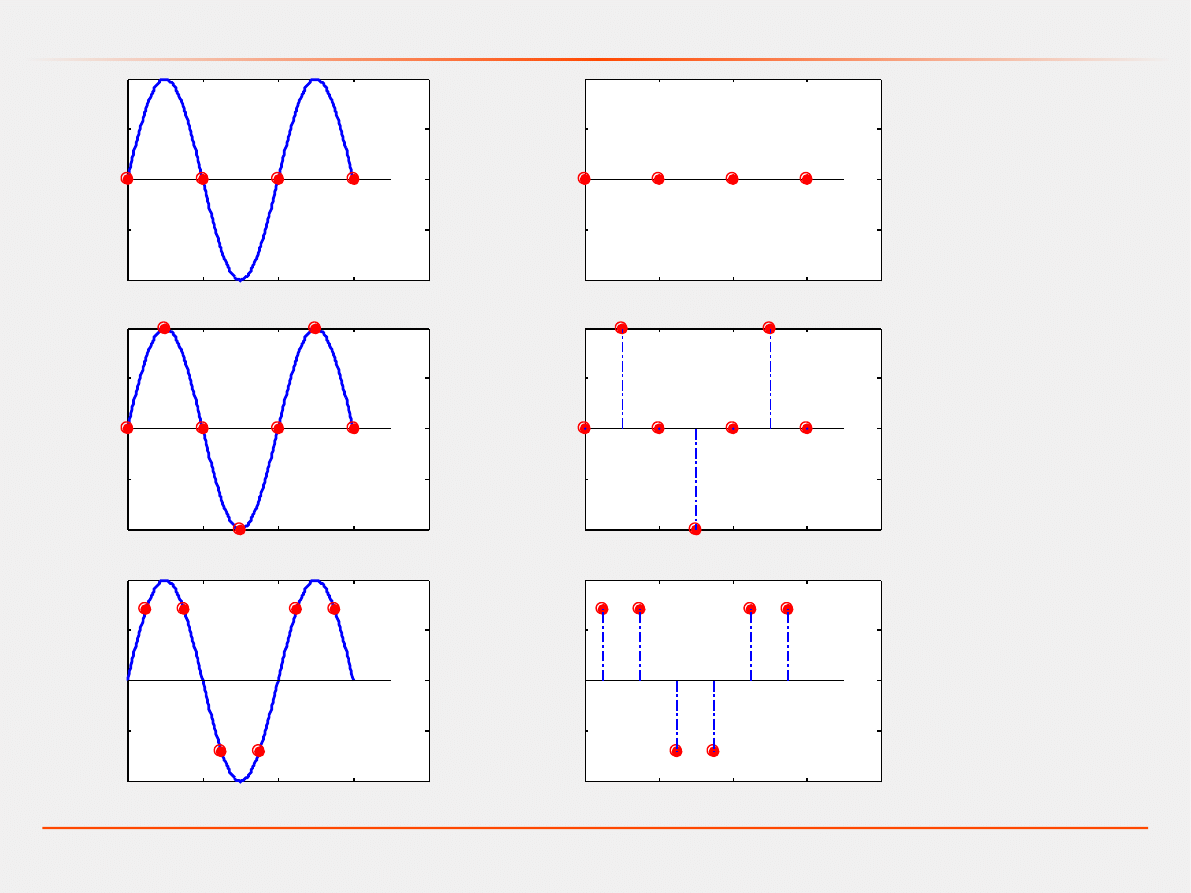
Dobór czasu próbkowania
0
1
2
3
4
-1
-0.5
0
0.5
1
f(
t)
t
0
1
2
3
4
-1
-0.5
0
0.5
1
f(
t)
t
0
1
2
3
4
-1
-0.5
0
0.5
1
f(
t)
t
0
1
2
3
4
-1
-0.5
0
0.5
1
f
*
(t
)
t
0
1
2
3
4
-1
-0.5
0
0.5
1
f
*
(t
)
t
0
1
2
3
4
-1
-0.5
0
0.5
1
f
*
(t
)
t
T=1
T=0.5
T=0.5
8
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny systemu dyskretnego
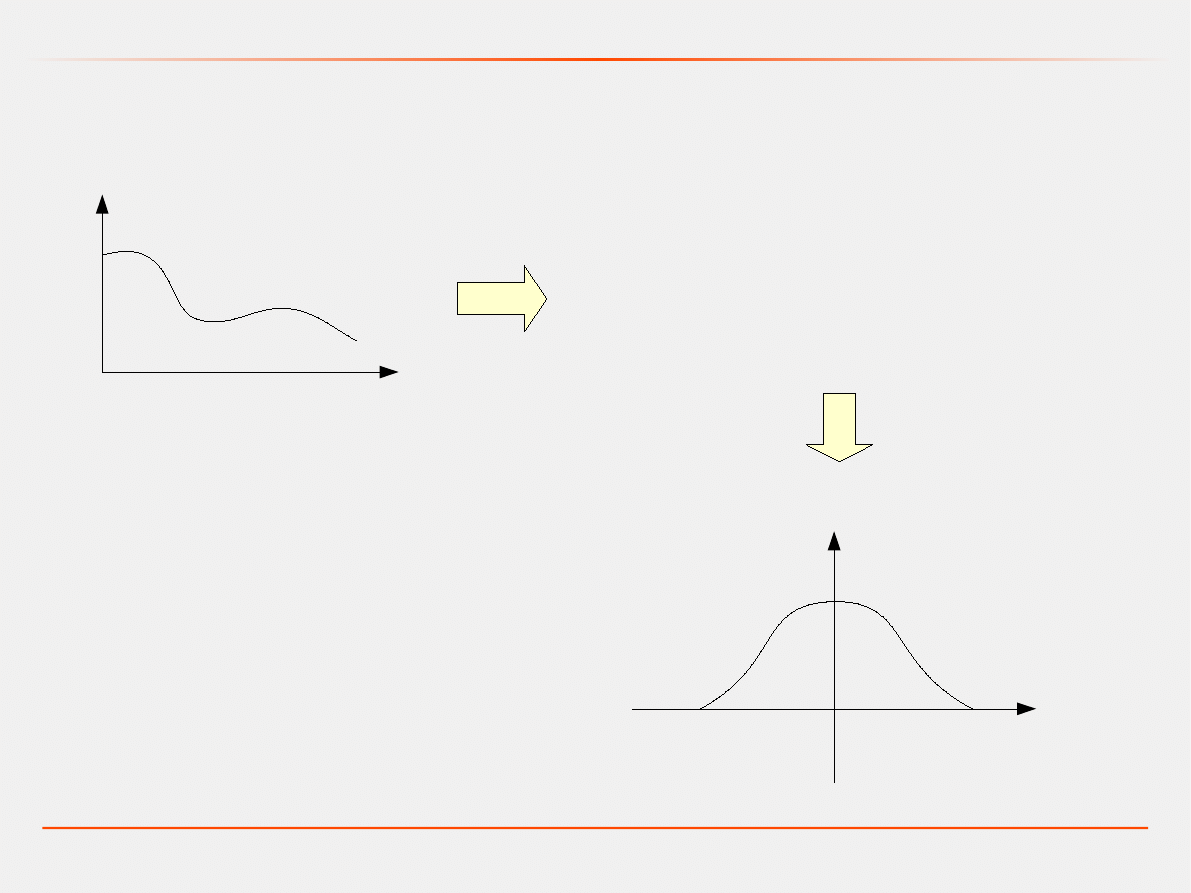
Twierdzenie Shannona-Kotielnikowa
t
f(t)
sygnał ciągły
ω
|F(jω)|
-ω
c
ω
c
Przekształcenie Fouriera
F j =
∫
−∞
∞
xt ⋅e
−
j t
dt
9
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny systemu dyskretnego
Twierdzenie Shannona-Kotielnikowa
Do tego, aby sygnał ciągły o widmie ograniczonym
maksymalną częstotliwością
ω
c
można było odtworzyć
dokładnie, według jego wartości dyskretnych, konieczne
jest aby częstotliwość kwantowania
ω
0
spełniała warunek:
0
2⋅
c
Okres kwantowania T
0
powinien spełniać warunek:
T
0
c
10
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny systemu dyskretnego
{
x[k1]= f x [k ] , u[k ] , k
y[ k ]=g x[k ] , u[k ] , k
Opis dyskretnego równania nieliniowego w przestrzeni
stanów
{
X [k1]= A[ k ] X [ k ]B [k ]U [k ]
Y [k ]=C [k ] X [k ]D[ k ]U [ k ]
Opis dyskretnego równania liniowego w przestrzeni stanów
Równania różnicowe
określają stan systemu w chwili
[k+1] w zależności od stanu z chwili poprzedniej [k] i
wartości wymuszenia u[k].
11
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny systemu dyskretnego
Metody przekształcania równań różniczkowych (ciągłych)
na równania różnicowe (dyskretne)
dx t
dt
=
x[ kT T ]−x[kT ]
T
metoda
różnicowa
Eulera
w
przód
(algorytm
ekstrapolacyjny)
dx t
dt
=
x[ kT ]−x[kT −T ]
T
metoda
różnicowa
Eulera
wstecz
(algorytm
interpolacyjny)
12
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
B
A
Model dynamiczny systemu dyskretnego
Przykład. Dyskretyzacja modelu ciągłego.
˙X t =
0
1
−
2 −2
⋅
X t
0
2
⋅
U t
˙X t =A⋅X tB⋅U t
X [ kT T ]= I A⋅T ⋅X [ kT ]B⋅T⋅U [kT ]
X [ k 1]=
1
T
−
2T 1−2T
⋅
X [ k ]
0
2T
⋅
U [ k ]
13
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Przekształcenie Laplace'a
Istnieje również przekształcenie odwrotne:
F z =Z
{
f [ k ]
}
=
∑
k =0
∞
F k z
−
k
Przekształcenie Laurenta
(przekształcenie Z) przyporządkowuje
danej dyskretnej funkcji czasu f[k] funkcję zmiennej zespolonej z,
F(z), którą nazywamy transformatą Z (Laurenta)
f [k ]=Z
−
1
{
F z
}
14
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Przekształcenie Laplace'a
Przekształcenie Laurenta
umożliwia sprowadzenie układu równań
różnicowych reprezentujących model dyskretny liniowy i
stacjonarny do układu równań algebraicznych.
{
X [k1]= A[ k ] X [ k ]B [k ]U [k ]
Y [k ]=C [k ] X [k ]D[ k ]U [ k ]
{
z⋅X z−zX 0= AX zBU z
Y z=CX zDU z
{
X z= zI −A
−
1
zX 0 zI −A
−
1
BU z
Y z=CX zDU z
15
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny – transmitancja operatorowa
G z=
Y z
U z
=
C zI −A
−
1
BD
Transmitancja operatorowa G(z)
jest zdefiniowana jako
stosunek transformaty Z sygnału wyjściowego Y(z) do
transformaty Z sygnału wejściowego U(z), przy założeniu,
że wszystkie warunki początkowe są zerowe.
16
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
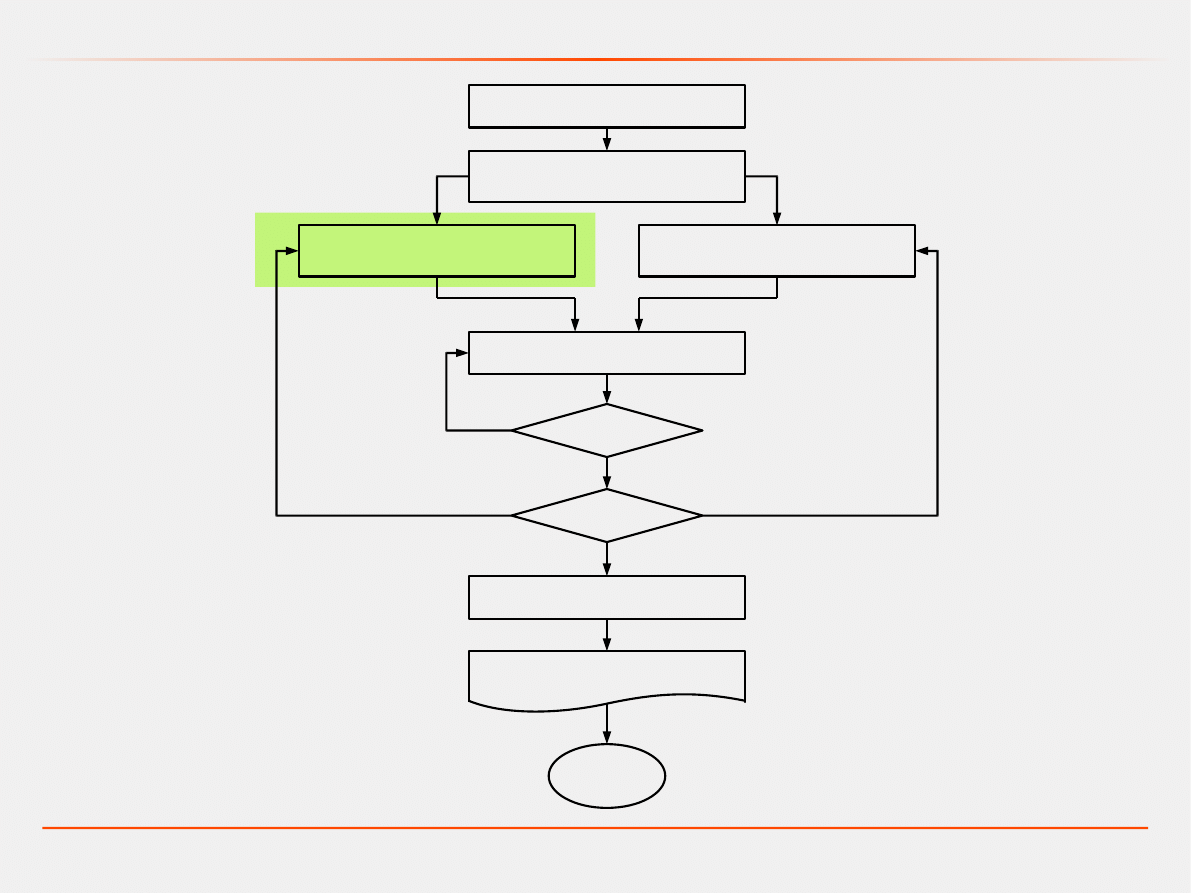
Sformułowanie problemu
Ustalenie celów
i planu działania
Zbieranie danych
Tworzenie modelu
konceptualnego
Kodowanie modelu
Testowanie
Nie
Wdrożenie
Tworzenie dokumentacji
i raportów
Weryfikacja
Walidacja
Nie
Nie
Tak
Tak
Proces modelowania
Wyszukiwarka
Podobne podstrony:
MIS wyklad 7
MIS wyklad 6
MIS wyklad 1
MIS wyklad 2
MIS wyklad 9
MiS wykład5 6
MIS wyklad 5
MIS wyklad 3
MIS wyklad 4
MIS wyklad 7
Napęd Elektryczny wykład
wykład5
Psychologia wykład 1 Stres i radzenie sobie z nim zjazd B
Wykład 04
geriatria p pokarmowy wyklad materialy
ostre stany w alergologii wyklad 2003
WYKŁAD VII
Wykład 1, WPŁYW ŻYWIENIA NA ZDROWIE W RÓŻNYCH ETAPACH ŻYCIA CZŁOWIEKA
więcej podobnych podstron