1
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Modelowanie i symulacja
dr inż. Piotr Piela
Zakład Metod Matematycznych
kontakt: pokój 28
ppiela@wi.ps.pl
2
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
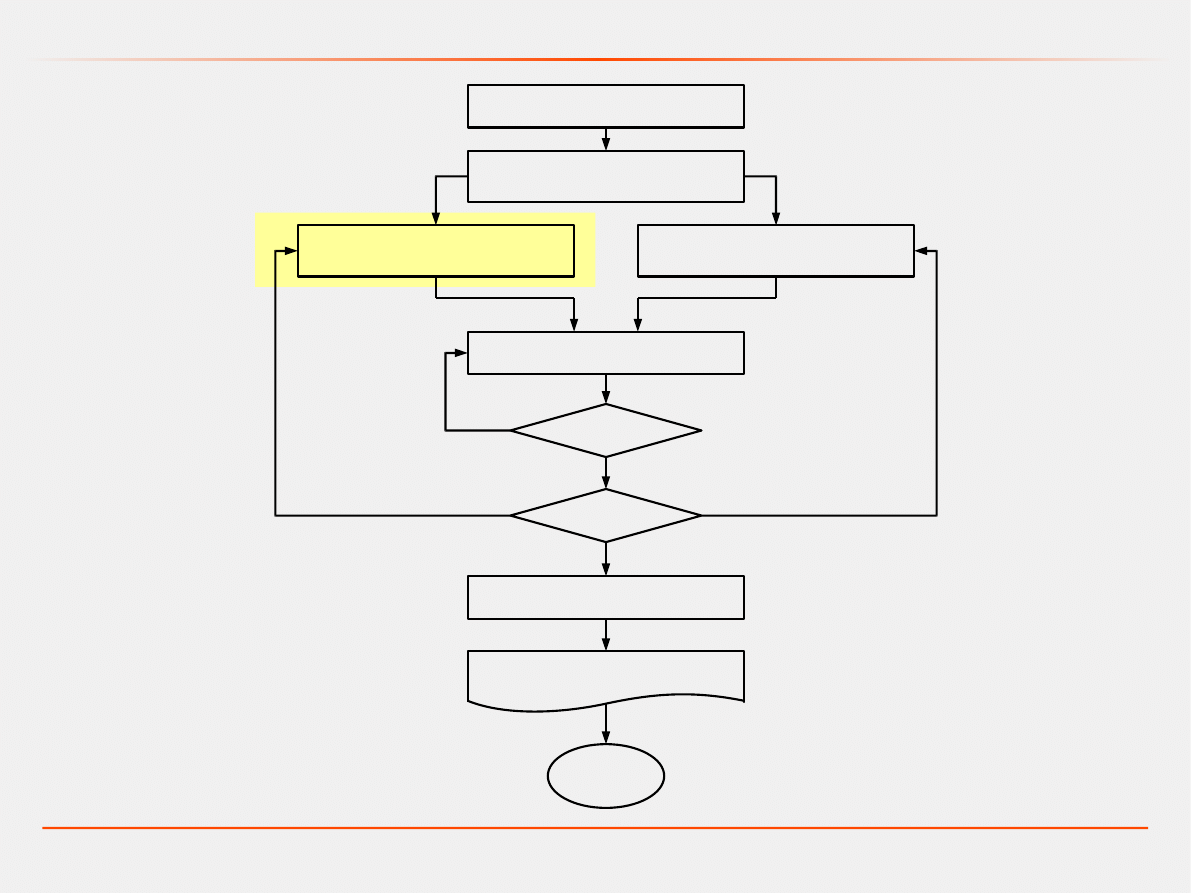
Proces modelowania
Sformułowanie problemu
Ustalenie celów
i planu działania
Zbieranie danych
Tworzenie modelu
konceptualnego
Kodowanie modelu
Testowanie
Nie
Wdrożenie
Tworzenie dokumentacji
i raportów
Weryfikacja
Walidacja
Nie
Nie
Tak
Tak
3
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Proces modelowania
Model dynamiczny –
model, w którym wyjście y zależy
od wartości wejścia u w całym nieskończonym
poprzedzającym przedziale czasowym.
y (u, t) = y {u(τ) : −∞ < τ ≤ t}
4
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
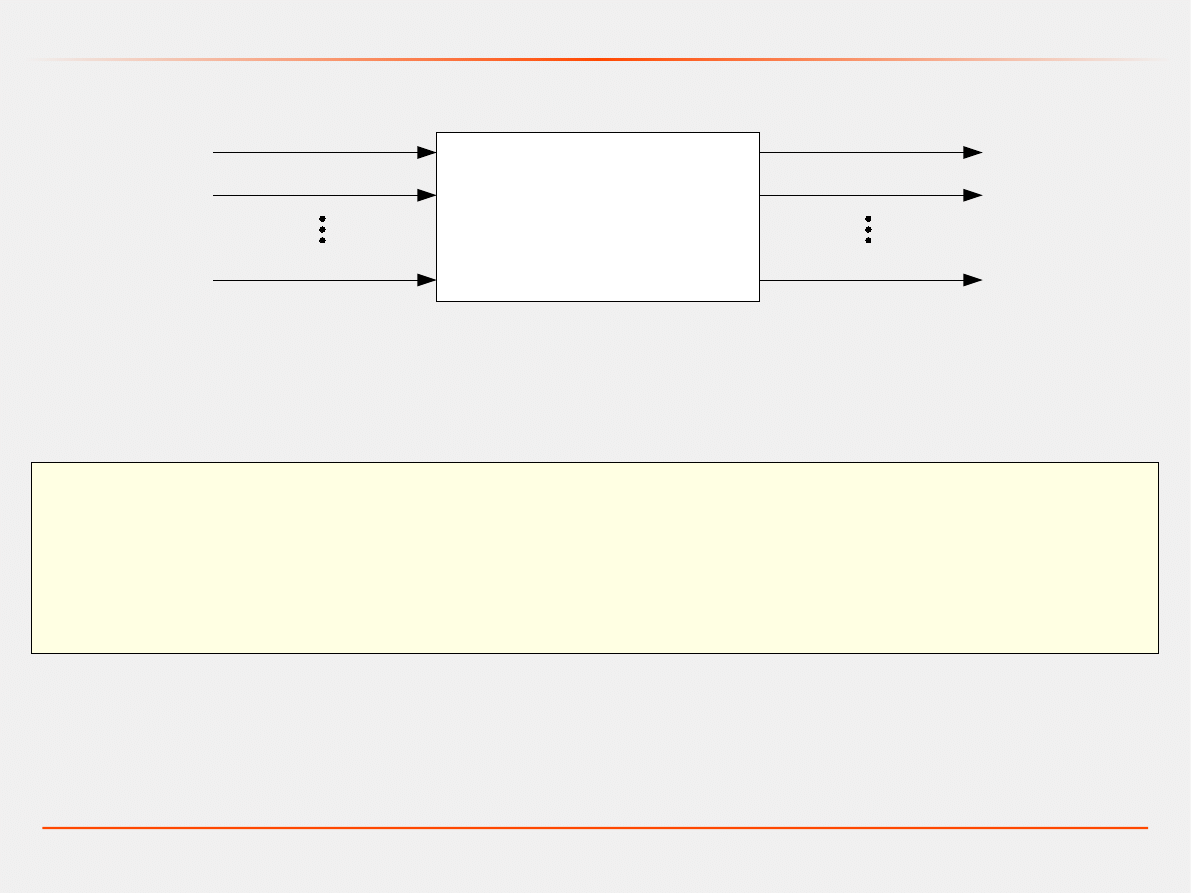
Stanem systemu
nazywamy najmniejszą liczbę danych, których
znajomość w danej chwili, przy znajomości wielkości wejściowych,
począwszy od tej chwili – pozwala jednoznacznie określić stan i
wielkości wyjściowe systemu w przyszłości.
Y=[y
1
y
2
... y
m
]
T
Stanem systemu
nazywamy najmniejszą liczbę danych, których
znajomość w danej chwili, przy znajomości wielkości wejściowych,
począwszy od tej chwili – pozwala jednoznacznie określić stan i
wielkości wyjściowe systemu w przyszłości.
SYSTEM
WIELKOŚCI
WEJŚCIOWE
WIELKOŚCI
WYJŚCIOWE
u
1
u
2
u
n
y
1
y
2
y
m
U=[u
1
u
2
... u
n
]
T
Model dynamiczny
5
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny
Wielkości charakteryzujące stan systemu reprezentowane są przez
zmienne stanu, których zbiór przedstawiany jest w postaci
wektora
stanu
.
Przestrzeń stanów
– n-wymiarowa przestrzeń, w której każdy stan
może być przedstawiony jako punkt w tej przestrzeni.
Zmienne stanu
to zestaw zmiennych, których znajomość w danej
chwili t zawiera całą informację o przeszłości systemu, przy czym
powinien to być zestaw o minimalnej liczbie zmiennych.
X=[x
1
x
2
... x
n
]
T
6
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny
Ten sam system może być opisany przez różne zbiory zmiennych
stanu.
Oprócz zmiennych stanu rozpatruje się dodatkowo zewnętrzne
zaburzenia, które w znacznym stopniu wpływają na zachowanie
systemu.
Jakikolwiek szeroki zbiór zmiennych stanu i zewnętrznych zaburzeń
nie opisuje całkowicie wszystkich właściwości systemu.
Dzieje się tak, ponieważ zachowanie rzeczywistego systemu zależy
od wielu dodatkowych czynników, które opisują specyfikę działania
danego systemu. Różne czynniki takiego rodzaju nazywamy
parametrami systemu
.
7
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Zbiór parametrów opisujących właściwości systemu można podzielić
na dwie grupy:
parametry techniczne
– określają różnicę pomiędzy
poszczególnymi systemami działającymi w tych samych
warunkach,
parametry środowiska i warunków działania
– określają różnice
pomiędzy warunkami działania tego samego systemu.
Model dynamiczny
8
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Niech będzie dany ciągły system dynamiczny, w którym istnieją
następujące zależności:
Model dynamiczny
Tak zdefiniowany system dynamiczny można opisać za pomocą
równania stanu
– układu równań różniczkowych pierwszego rzędu:
Uzupełnieniem opisu są
równania wyjścia
określające związek
między wielkościami wyjściowymi a zamiennymi stanu i wejścia:
X
t = X t
0
,U t ,t
0
Y
t = X t
0
,U t , t
0
˙X t=F
1
X t
0
,U t , t
0
Y
t=F
2
X t
0
,U t , t
0
9
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Najczęściej stosowaną, a jednocześnie najbardziej ogólną metodą
formułowania modeli systemów dynamicznych opisanych przy
pomocy równań stanu i równań wyjście jest
metoda bilansowa
.
W systemach, w których mamy do czynienia z wielkościami
materialnymi, bilansowaniu najczęściej podlegają wielkości, które
podporządkowane są
zasadom zachowania: masy, energii,
ładunku, pędu i momentu pędu
.
W systemach ekonomiczno-społecznych odpowiednikiem energii czy
masy są takie wielkości jak zasoby finansowe lub siła robocza.
Odpowiednikiem mocy są zdolności przerobowe lub zatrudnienie.
Model dynamiczny – formułowanie równań stanu
10
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
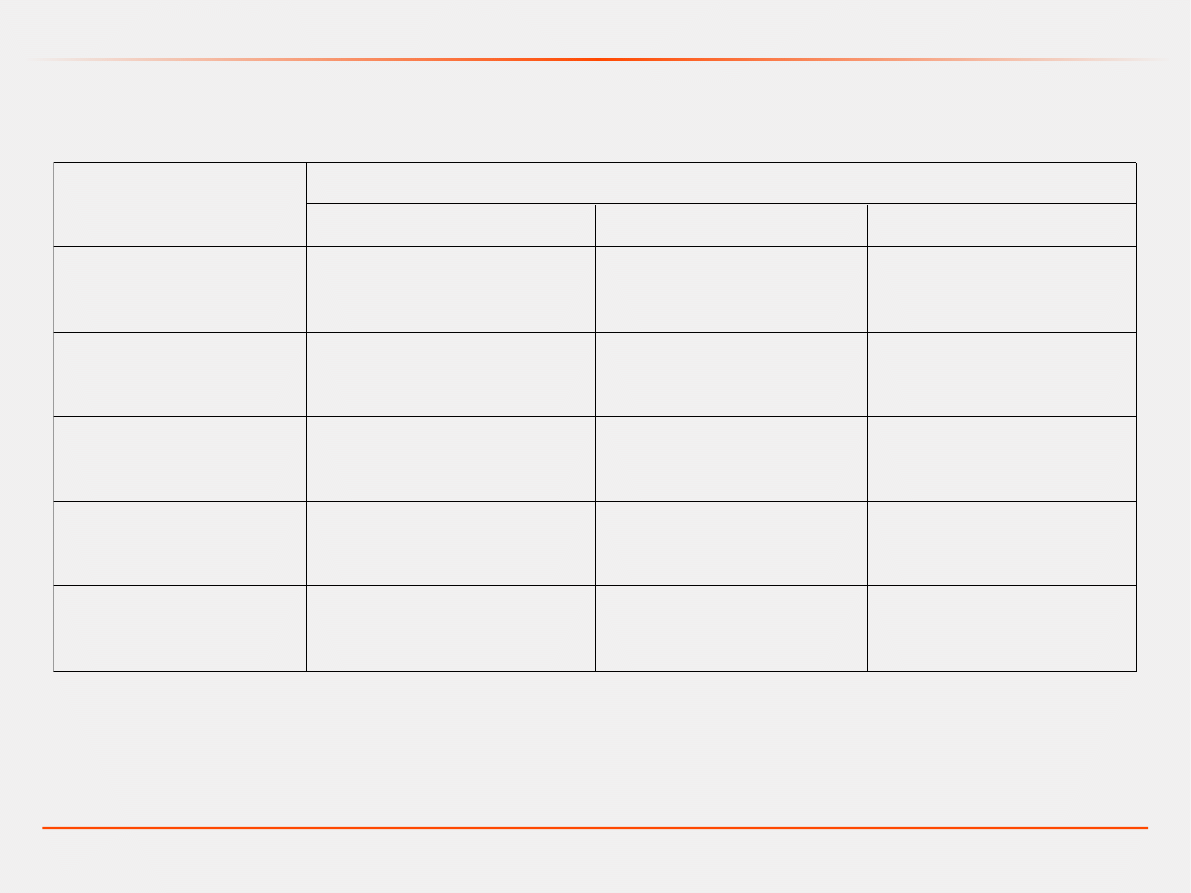
Model dynamiczny – analogie między zjawiskami
Wielkość fizyczna
Elektrotechnika
DZIEDZINA
Termodynamika
Hydrodynamika
zbiornik
kondensator
ciało o jednolitej
temperaturze
zbiornik cieczy
kanał
przewodnik łączący dwa
kondensatory
powierzchnia styku dwóch
ciał
rurociąg między dwoma
zbiornikami
wielkość bilansowana q
ładunek elektryczny q
energia cieplna Q
masa m
natężenie przepływu
i = dq/dt
natężenie prądu
elektrycznego i = dq/dt
strumień ciepła i = dQ/dt
strumień masy i = dm/dt
potencjał
φ
potencjał elektryczny
φ
temperatura T
wysokość słupa cieczy h
11
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Etapy budowy modelu:
wybór wielkości bilansowych,
ułożenie równań bilansowych,
wybór wielkości stanu,
ułożenie równań stanu,
określenie wielkości wyjściowych.
Model dynamiczny – metoda bilansowa
12
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
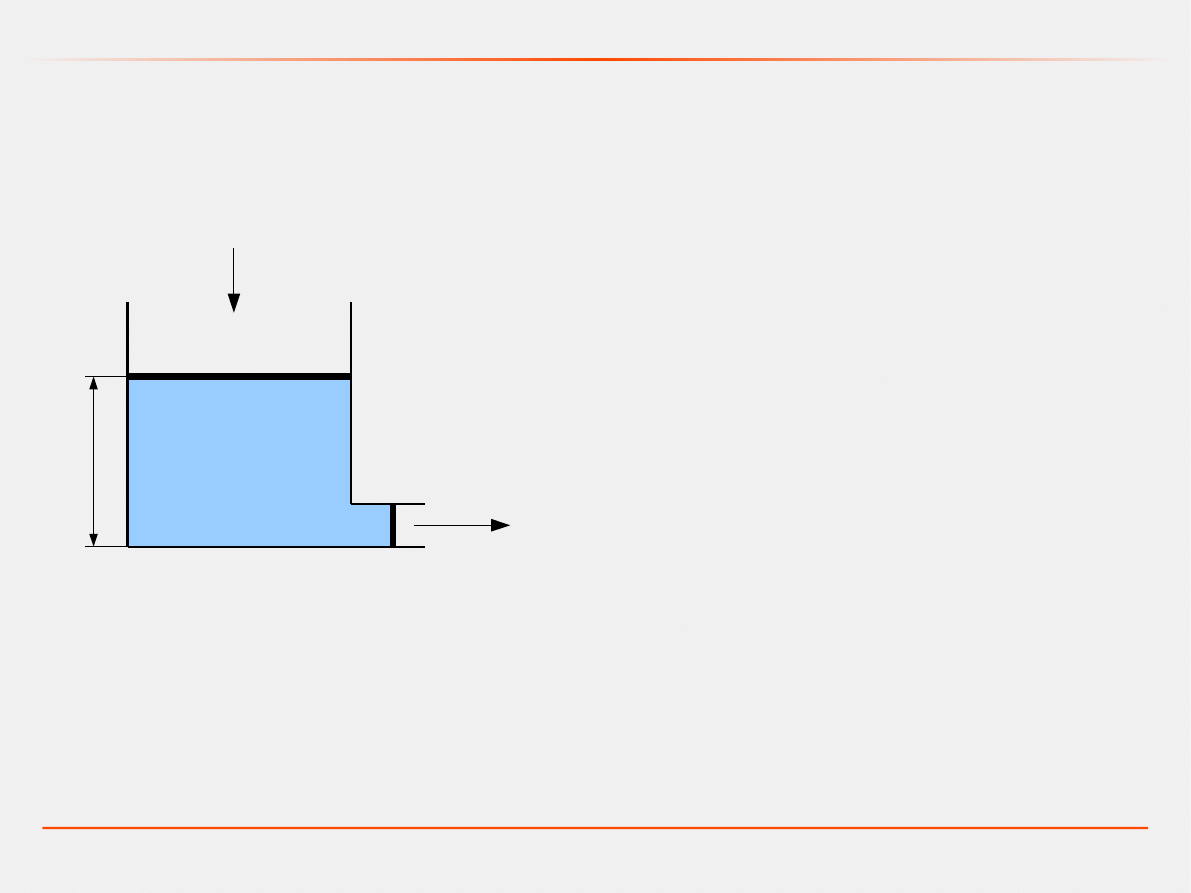
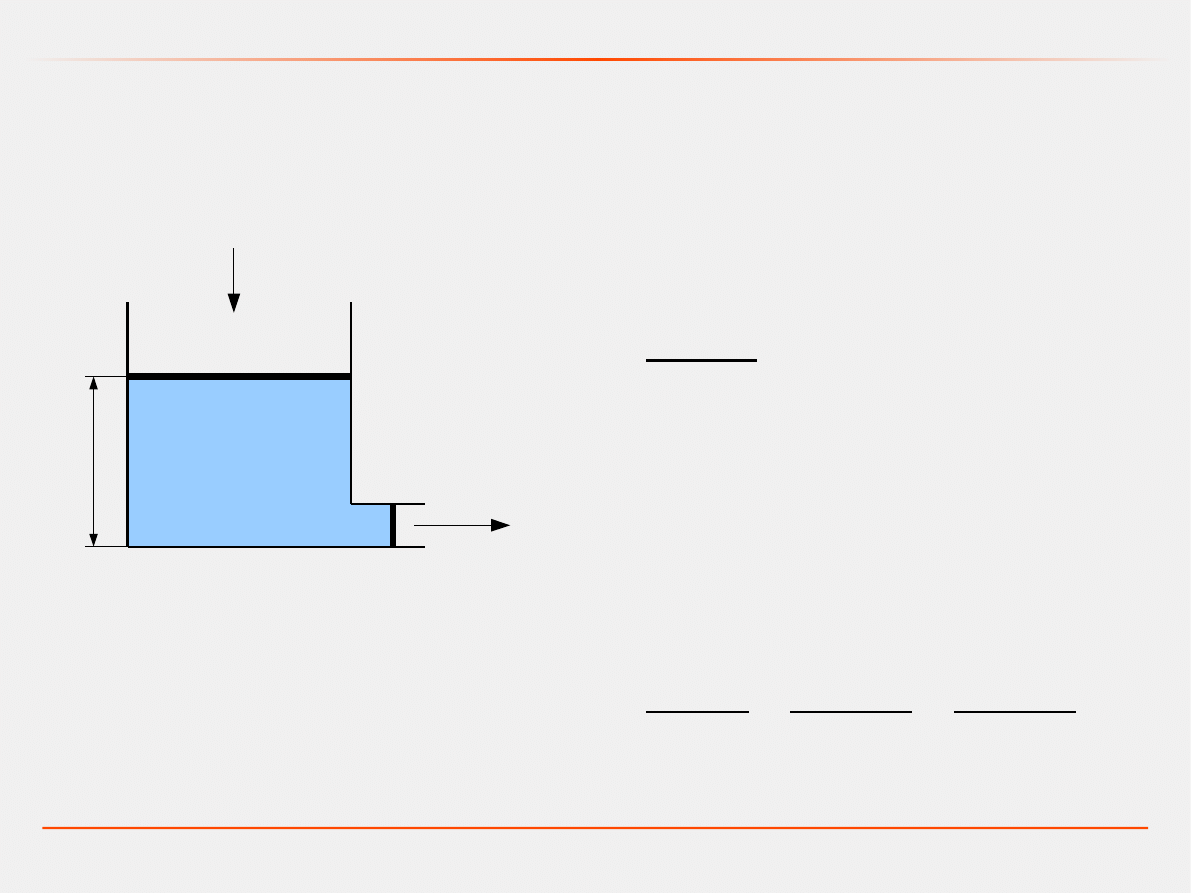
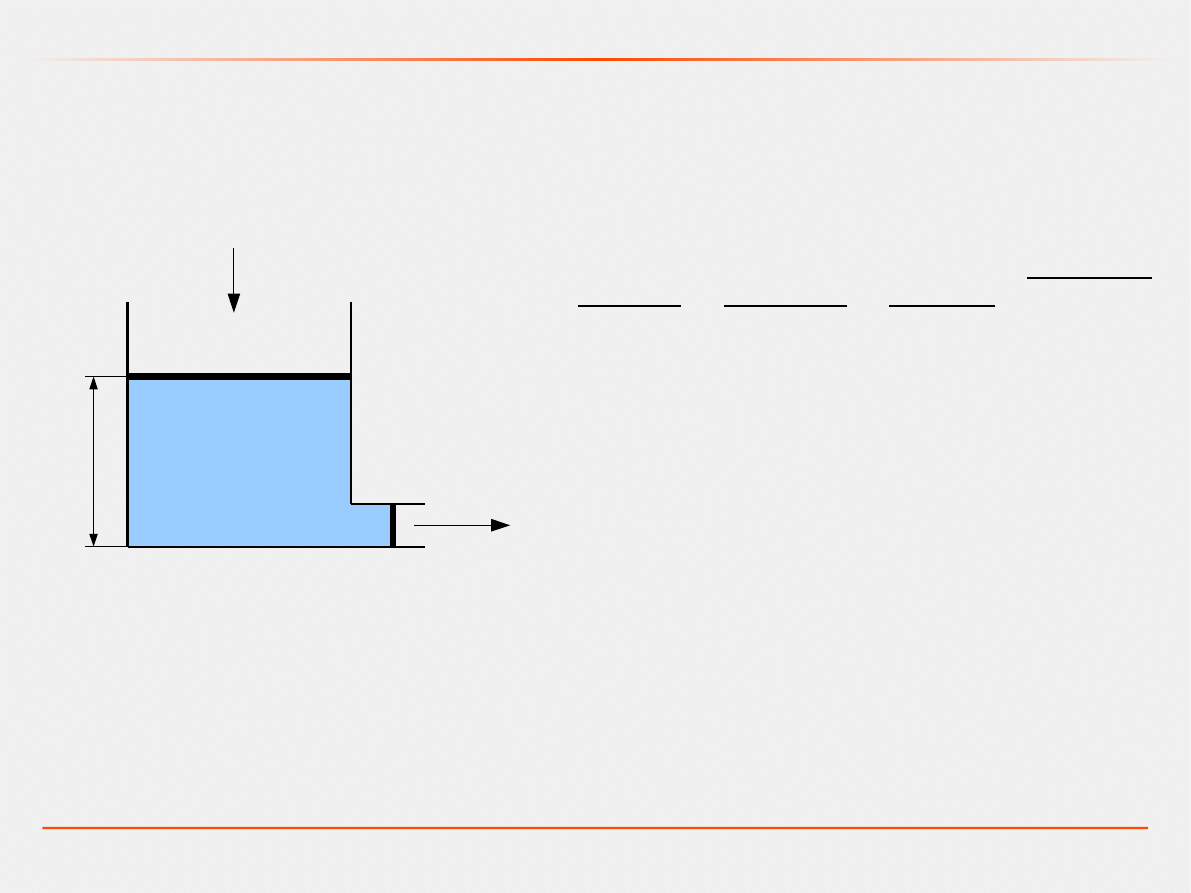
Przykład: Model zbiornika z cieczą
Model dynamiczny – metoda bilansowa
Q
we
Q
wy
h
S
wy
S
Q
we
(t)
– chwilowy dopływ,
Q
wy
(t)– chwilowy odpływ,
S – przekrój poprzeczny zbiornika,
S
wy
– przekrój poprzeczny odpływu,
h(t) – wysokość słupa cieczy,
w(t) – zapełnienie zbiornika (ilość cieczy)
w
13
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
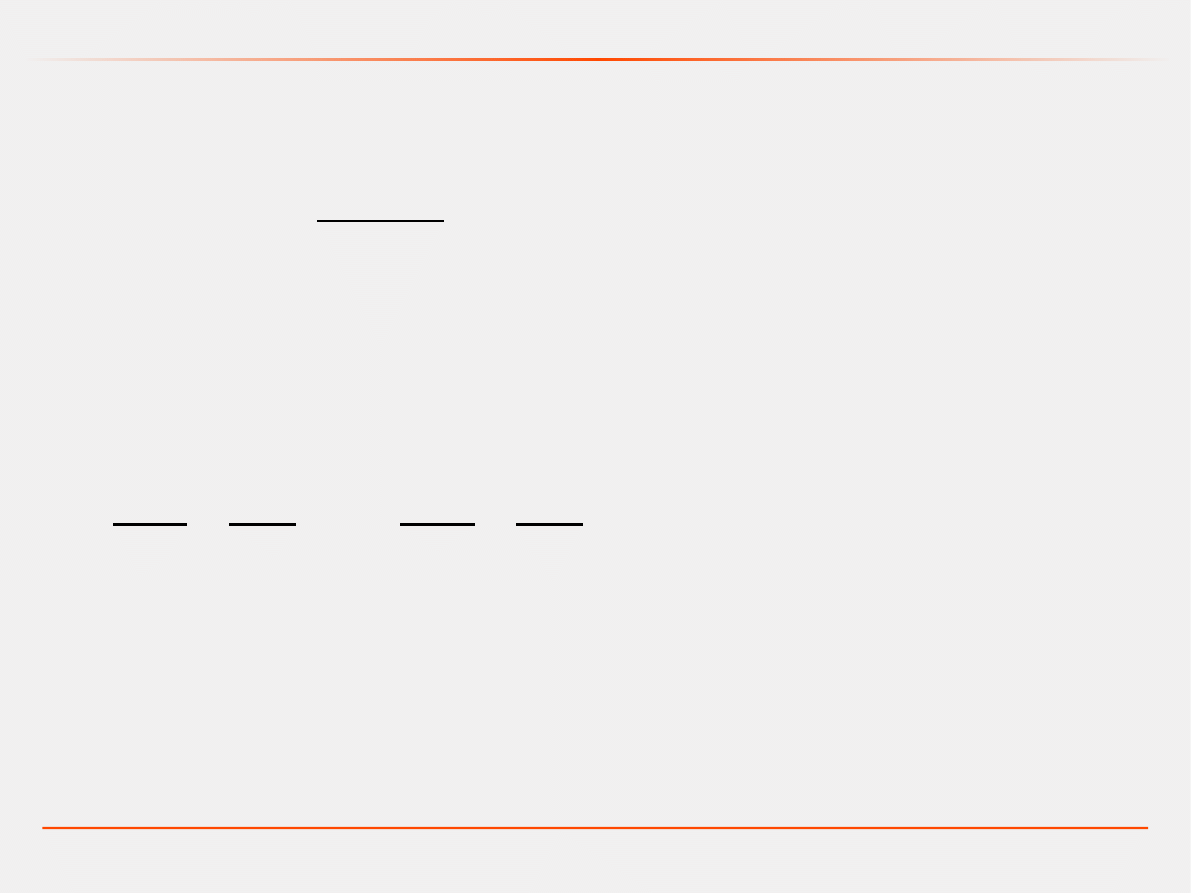
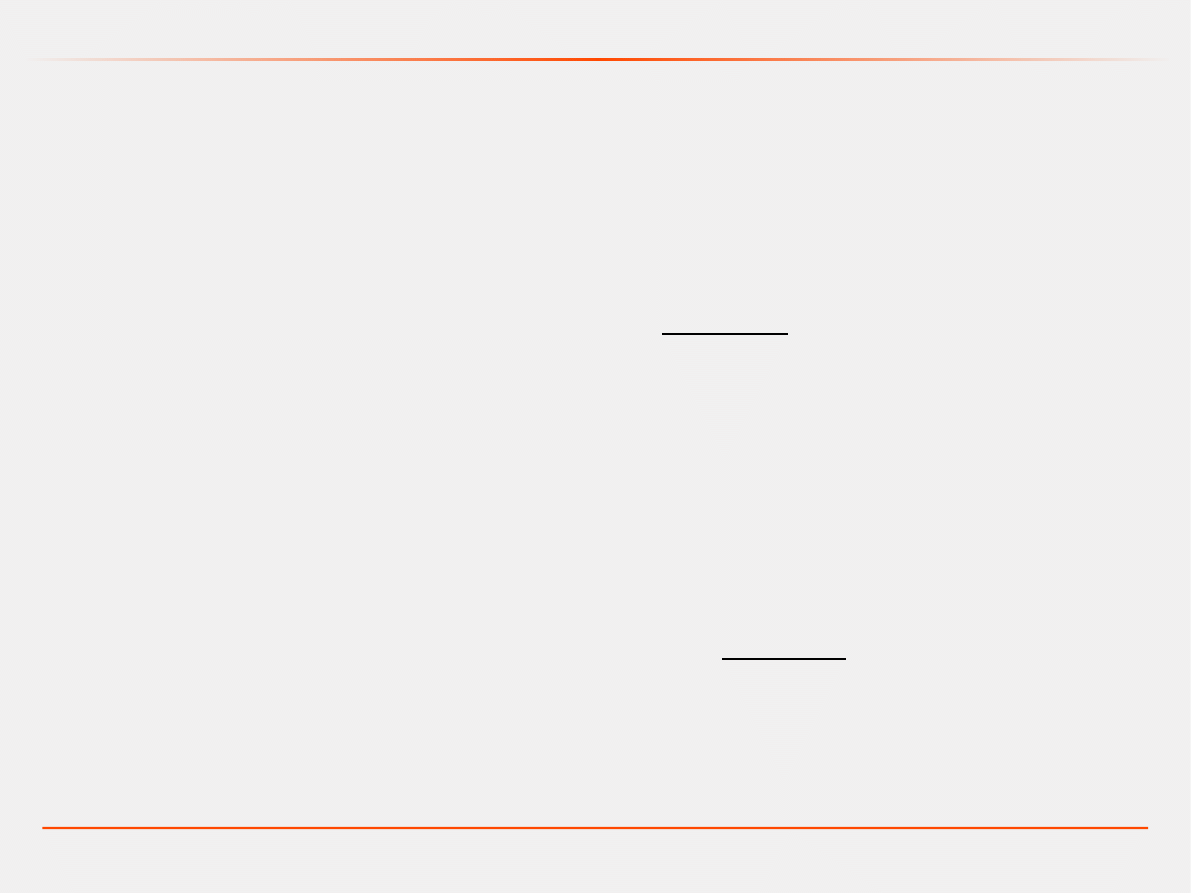
Przykład: Model zbiornika z cieczą
Model dynamiczny – metoda bilansowa
Q
we
Q
wy
h
S
wy
S
w
Równanie bilansowe:
Wielkość bilansowa:
w(t)
dw
t
dt
=Q
we
t−Q
wy
t
w
t=S⋅ht
Zmienna stanu:
h(t)
Równanie stanu:
dh
t
dt
=
Q
we
t
S
−
Q
wy
t
S
14
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny – metoda bilansowa
Prędkość wypływu
v
wy
cieczy doskonałej ze zbiornika przez mały otwór
jest opisana równaniem:
v
wy
=
2gh
t
h(t)
– wysokość słupa cieczy,
g
– przyśpieszenie ziemskie,
Równanie na prędkość wypływu
v
wy
można wyprowadzić posługując się
równaniem Bernoulliego dla przekrojów
S
i
S
wy
:
v
we
2
2g
p
we
g
h=
v
wy
2
2g
p
wy
g
p
we
– ciśnienie wejściowe,
p
wy
– ciśnienie wyjściowe,
ρ
– gęstość cieczy,
Z prawa ciągłości strugi wynika:
v
we
S
=v
wy
S
wy
15
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny – metoda bilansowa
Po przekształceniach otrzymamy równanie na prędkość wypływu
v
wy
w
postaci:
v
wy
=
2
[ gh− p
wy
− p
we
]
[
1
−
S
wy
S
2
]
Jeśli otwór wypływowy
S
wy
jest bardzo mały to:
1
−
S
wy
S
2
≃1
oraz
p
we
=
p
wy
=
p
otoczenia
v
wy
=
2gh
t
to otrzymamy:
16
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny – metoda bilansowa
Ostatecznie wypływ określa zależność:
Q
wy
=S
wy
⋅v
wy
=S
wy
⋅
2gh
t
Prędkość wypływu cieczy rzeczywistej jest zawsze mniejsza niż cieczy
doskonałej. Spowodowane jest to siłami tarcia (lepkością), a także
zwężeniem strumienia cieczy w pewnej odległości od otworu. Dla cieczy
rzeczywistej można zatem zapisać:
v
wy
=
2gh
t
Współczynnik
ϕ
nosi nazwę współczynnika wypływu. Jego wartość
zależy od kształtu otworu wypływowego i jego usytuowania względem
ścian zbiornika. Przybiera wartość 0 <
ϕ
< 1.
17
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
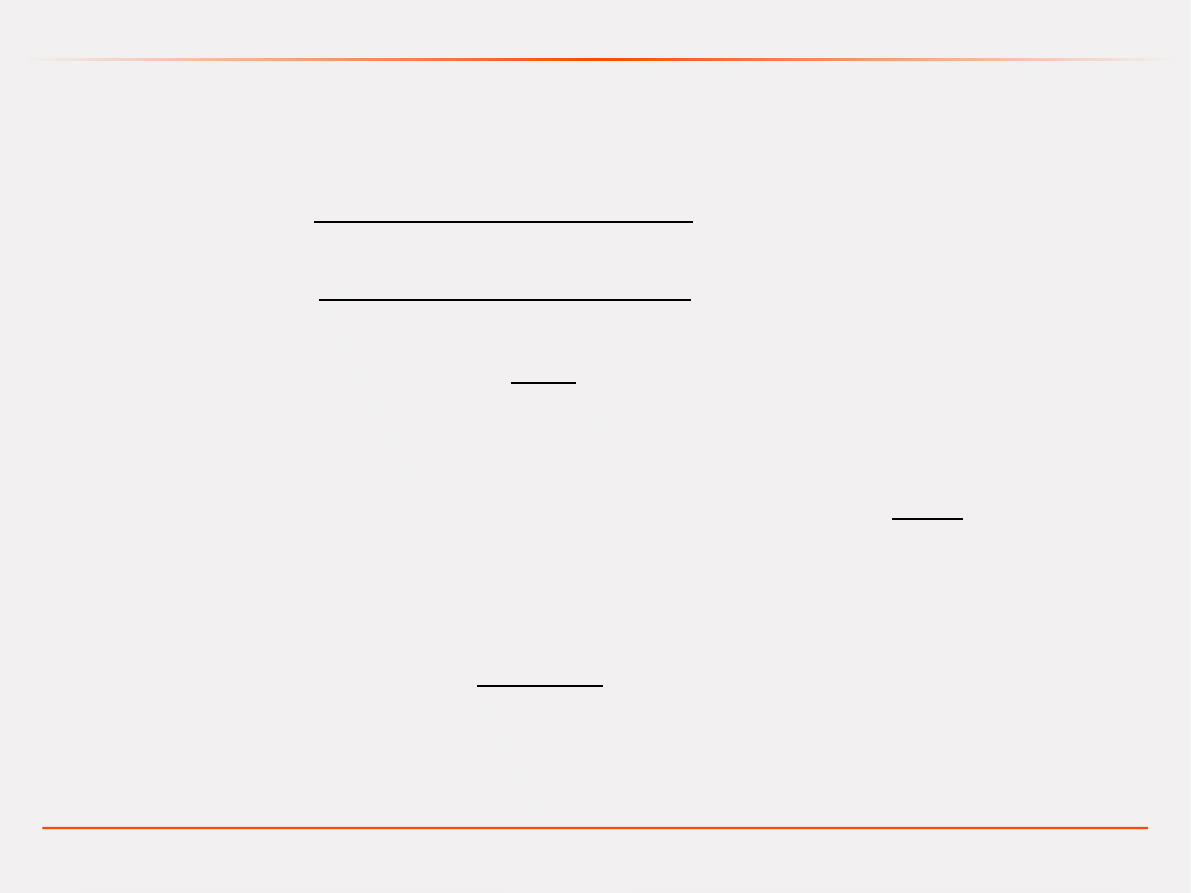
Przykład: Model zbiornika z cieczą
Model dynamiczny – metoda bilansowa
Q
we
Q
wy
h
S
wy
S
w
Równanie stanu:
dh
t
dt
=
Q
we
t
S
−
S
wy
S
2gh
t
Równanie wyjścia:
y
t=ht
18
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Innymi metodami formułowania modeli systemów dynamicznych
opisanych przy pomocy równań stanu są
metody wariacyjne
. Ich
podstawą są zasady wariacyjne mówiące, że ruch układu
dynamicznego przebiega tak, aby charakteryzujący ten układ
funkcjonał czasowy, zwany działaniem, osiągnął wartość stacjonarną
(zwykle minimalną). Najczęściej wykorzystywana jest
zasada
wariacyjna Hamiltona
(
zasada najmniejszego działania
).
Zasada najmniejszego działania jest najbardziej ogólnym
sformułowaniem praw ruchu systemów mechanicznych. Dzięki
zastosowaniu odpowiednich analogii zasada ta pozwala budować
modele innych systemów (elektromechanicznych, elektrycznych)
Model dynamiczny – zasada najmniejszego działania
19
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Według zasady najmniejszego działania dla każdego systemu
mechanicznego, w którym nie zachodzi rozpraszanie energii (system
konserwatywny) można sformułować funkcję stanu zwaną funkcją
Lagrange'a,
spełniającą warunek: przebieg
q
(t)
od
punktu o współrzędnych
q
1
do punktu o współrzędnych
q
2
odbywa
się w ten sposób, że całka określona w przedziale
z funkcji
:
przyjmuje wartość minimalną. Wielkość
S
nazywa się działaniem.
Model dynamiczny – zasada najmniejszego działania
L
q , ˙q ,t
t
∈t
1
,t
2
L
q , ˙q ,t
S
=
∫
t
1
t
2
L
q , ˙q ,tdt
20
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Wyznaczenie funkcji
q
(t),
dla
(t
1
, t
2
)
, która minimalizuje funkcjonał
S
jest zadaniem rachunku wariacyjnego.
Po dokonaniu odpowiednich przekształceń matematycznych, z
zasady najmniejszego działania uzyskujemy model dynamicznego
systemu konserwatywnego w postaci równań Eulera-Lagrange'a
Model dynamiczny – zasada najmniejszego działania
d
dt
∂ L
∂ ˙q
k
− ∂
L
∂ q
k
=Q
k
k=1, N
21
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Równania Eulera-Lagrange'a
Model dynamiczny – zasada najmniejszego działania
d
dt
∂ L
∂ ˙q
k
− ∂
L
∂ q
k
=Q
k
k=1, N
N
- liczba
stopni swobody systemu
–
równa liczbie współrzędnych
uogólnionych (liczbie prędkości uogólnionych)
˙q
k
q
k
Q
k
-
współrzędne
uogólnione
,
opisujące
system
po
wyeliminowaniu zmiennych zależnych
-
prędkości uogólnione
.
-
siła uogólniona
związana ze współrzędną uogólnioną
q
k
-
funkcja Lagrange'a
L
=Lq , ˙q ,t
22
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Równania Eulera-Lagrange'a
Model dynamiczny – zasada najmniejszego działania
d
dt
∂ L
∂ ˙q
k
− ∂
L
∂ q
k
=Q
k
k=1, N
L
=T −U
Dla konserwatywnych systemów mechanicznych funkcja Lagrange'a
jest różnicą między energią kinetyczną
T
a energią potencjalną
U
systemu.
Ostatecznie równania Eulera-Lagrange'a przyjmie postać:
d
dt
∂T
∂ ˙q
k
− ∂
T
∂ q
k
∂
U
∂ q
k
=Q
k
NP
k=1, N
23
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny – zasada najmniejszego działania
Równania Eulera-Lagrange'a tworzą układ
N
równań różniczkowych
zwyczajnych rzędu drugiego. Równanie te uzupełnione o
2N
warunków początkowych jednoznacznie określają równania ruchu
konserwatywnego systemu mechanicznego. Wyrażają one drugie
prawo Newtona równowagi sił.
Wyszukiwarka
Podobne podstrony:
MIS wyklad 7
MIS wyklad 6
MIS wyklad 1
MIS wyklad 2
MIS wyklad 9
MiS wykład5 6
MIS wyklad 8
MIS wyklad 5
MIS wyklad 4
MIS wyklad 7
Napęd Elektryczny wykład
wykład5
Psychologia wykład 1 Stres i radzenie sobie z nim zjazd B
Wykład 04
geriatria p pokarmowy wyklad materialy
ostre stany w alergologii wyklad 2003
WYKŁAD VII
Wykład 1, WPŁYW ŻYWIENIA NA ZDROWIE W RÓŻNYCH ETAPACH ŻYCIA CZŁOWIEKA
więcej podobnych podstron