1
Dynamika
Dynamika w przeciwieństwie do kinematyki zajmuje się
związkiem ruchu z jego przyczyną, tzn. z siłą.
PODSTAWOWE WIELKOŚCI
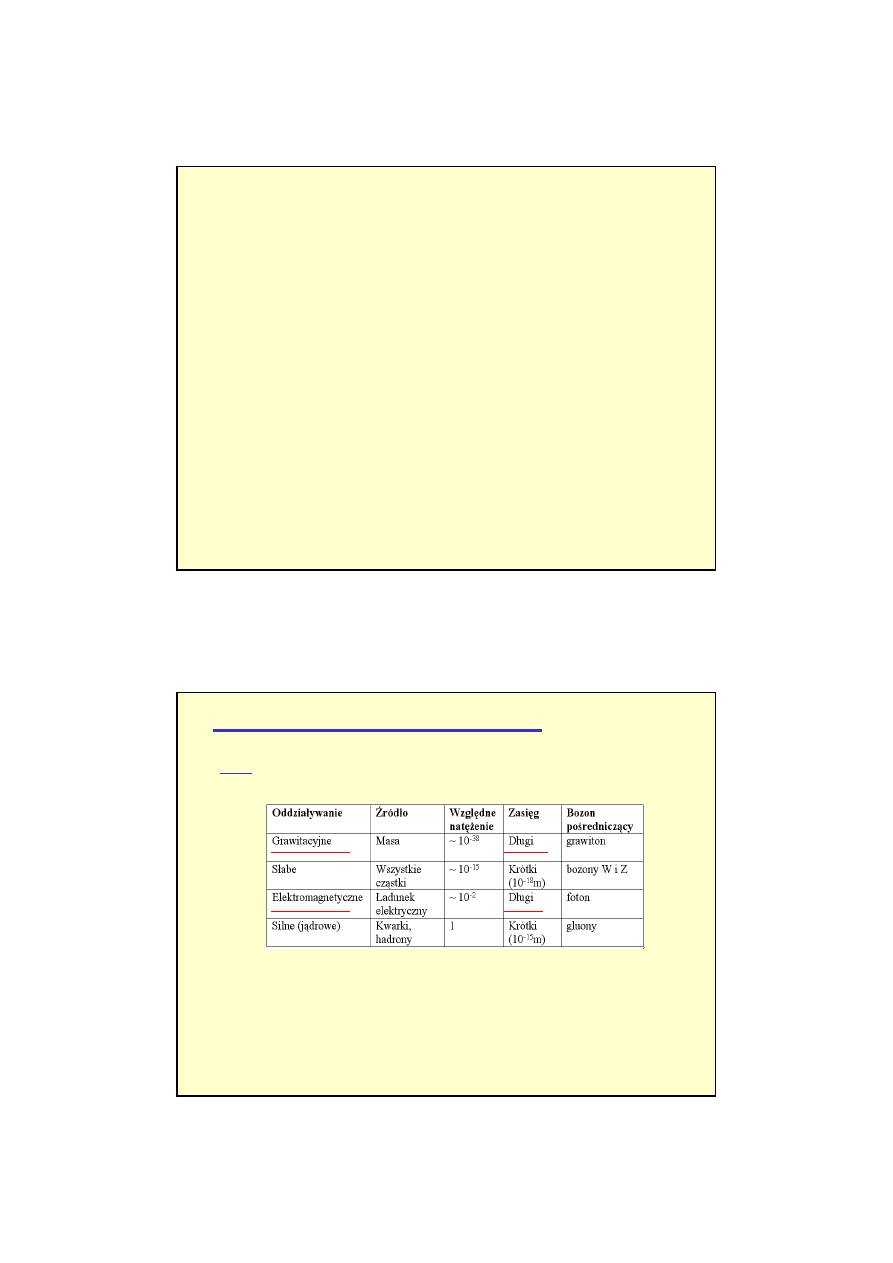
• Siła jest sposobem opisu oddziaływania ciał.
- Siła ma zdolno
ść
nadawania ciału (ciałom) przyspieszenia, czyli
rozp
ę
dzania ciała.
- Skutkiem działania siły mo
ż
e by
ć
te
ż
deformacja ciała.
- Siła jest wielko
ś
ci
ą
wektorow
ą
:
F
.
2
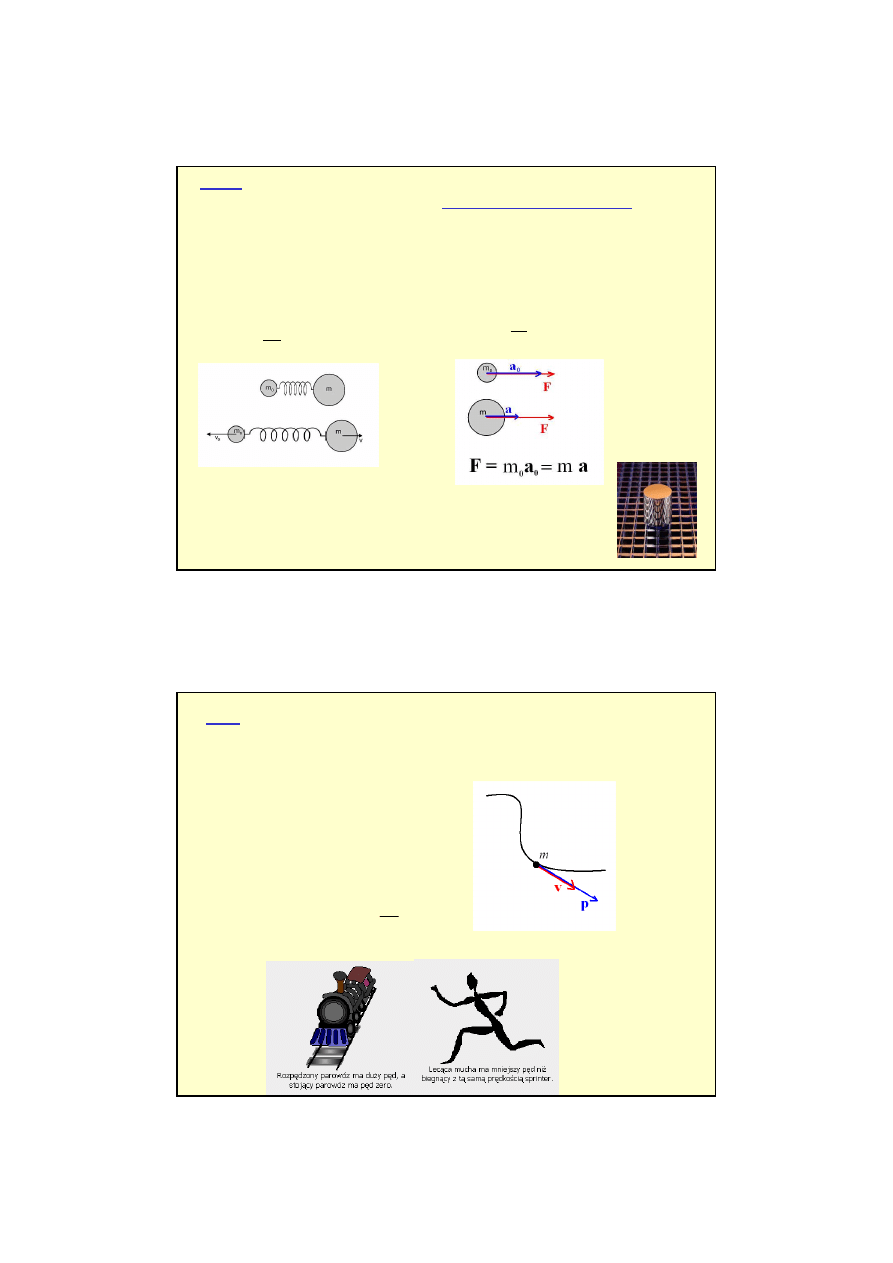
Masa (bezwładna) jest miar
ą
bezwładno
ś
ci ciała. Ciało o wi
ę
kszej
masie „trudniej” jest rozp
ę
dzi
ć
do pewnej zadanej pr
ę
dko
ś
ci ni
ż
ciało
o masie mniejszej.
„Trudniej” jest te
ż
zatrzyma
ć
ciało o wi
ę
kszej masie, rozp
ę
dzone do
takiej samej pr
ę
dko
ś
ci co ciało o mniejszej masie.
- Definicja przez porównanie:
v
v
0
0
m
m
=
- Inna definicja przez porównanie:
a
a
m
m
0
0
=
Jednostk
ą
masy jest kilogram: 1 kg
wzorzec jest wykonany ze stopu platyny z irydem i
przechowywany w Międzynarodowym Biurze Miar w
Sèvres koło Paryża.
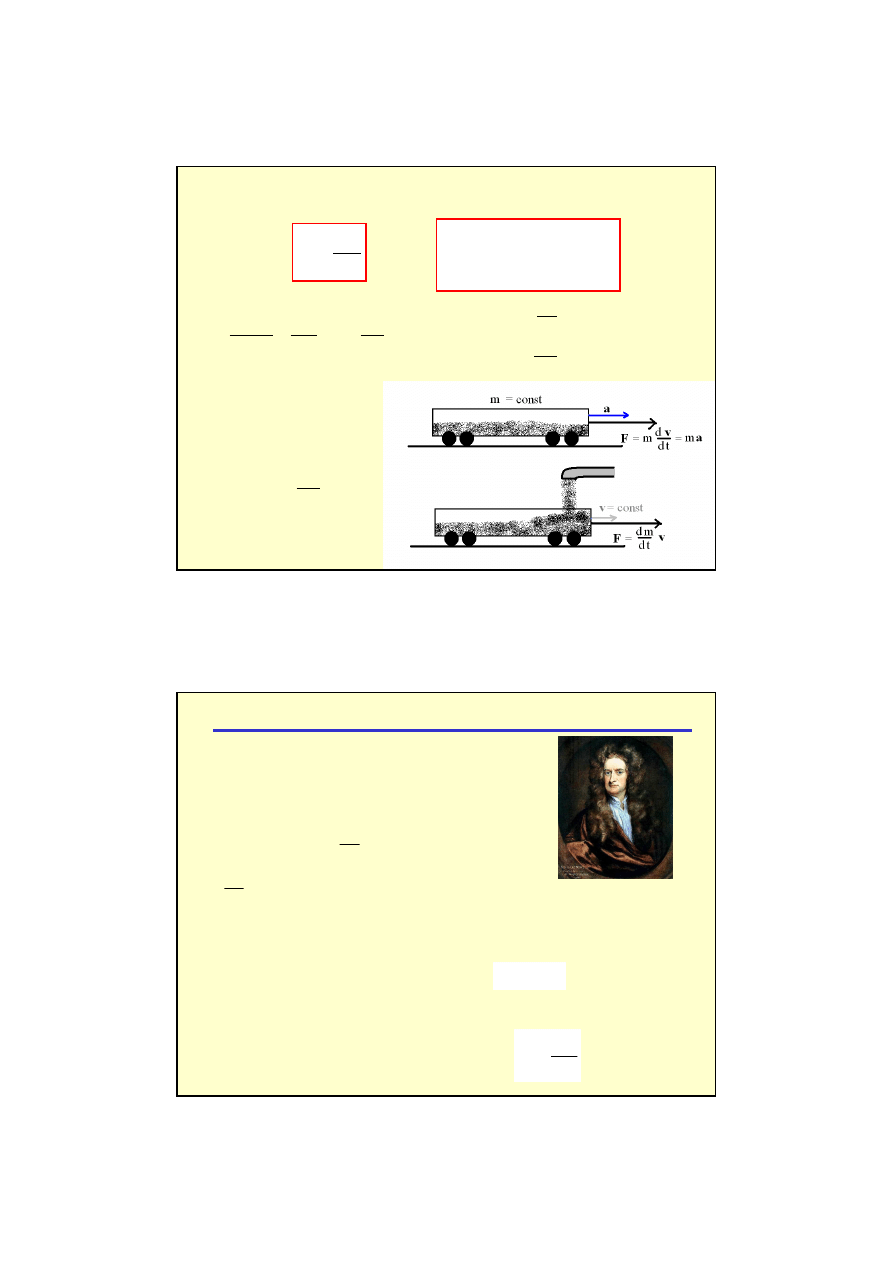
• P
ę
d jest wielko
ś
ci
ą
stosowan
ą
do opisu ciał w ruchu.
Im wi
ę
kszy p
ę
d tym „trudniej” zatrzyma
ć
ciało. Na wielko
ść
p
ę
du
wpływa masa ciała oraz pr
ę
dko
ść
z jak
ą
si
ę
ciało porusza.
Jednostk
ą
p
ę
du jest
Ś
cisła definicja p
ę
du:
v
p
m
=
s
m
kg
3
dt
d
m
dt
m
d
dt
)
d(m
v
v
v
F
+
=
=
2
1
1
s
m
kg
N
=
Jednostk
ą
siły jest:
=
=
=
=
=
const
dla
dt
m
d
const
m
dla
m
dt
d
m
v
v
F
a
v
F
⇒
ZWI
Ą
ZEK MIEDZY PODSTAWOWYMI WIELKO
Ś
CIAMI
t
d
d p
F
=
'
d
)
'
(
)
(
0
0
∫
+
=
t
t
t
t
t
F
p
p
⇒
const
dt
d
dt
d
wyp
=
⇒
=
=
⇒
=
⇒
=
=
∑
v
a
v
p
F
F
0
0
0
Zasada
zachowania p
ę
du
I.
Jeżeli na ciało (o stałej masie) nie działa żadna siła lub
wypadkowa działających sił wynosi zero to ciało porusza się
ruchem jednostajnym prostoliniowym lub pozostaje w
spoczynku.
II.
Jeśli na ciało o stałej masie m działa siła
F
to nadaje ona ciału przyspieszenie
a
,
przy czym związek między tymi wielkościami jest następujący:
a
F
m
=
t
d
d p
F
=
II a. Ogólniejsze prawo mówi, że tempo zmian pędu ciała jest równe sile wypadkowej
działającej na to ciało
ZASADY (PRAWA) DYNAMIKI NEWTONA
1686 –Isaac Newton: „Philosophiae
Naturalis Principia Mathematica”
4
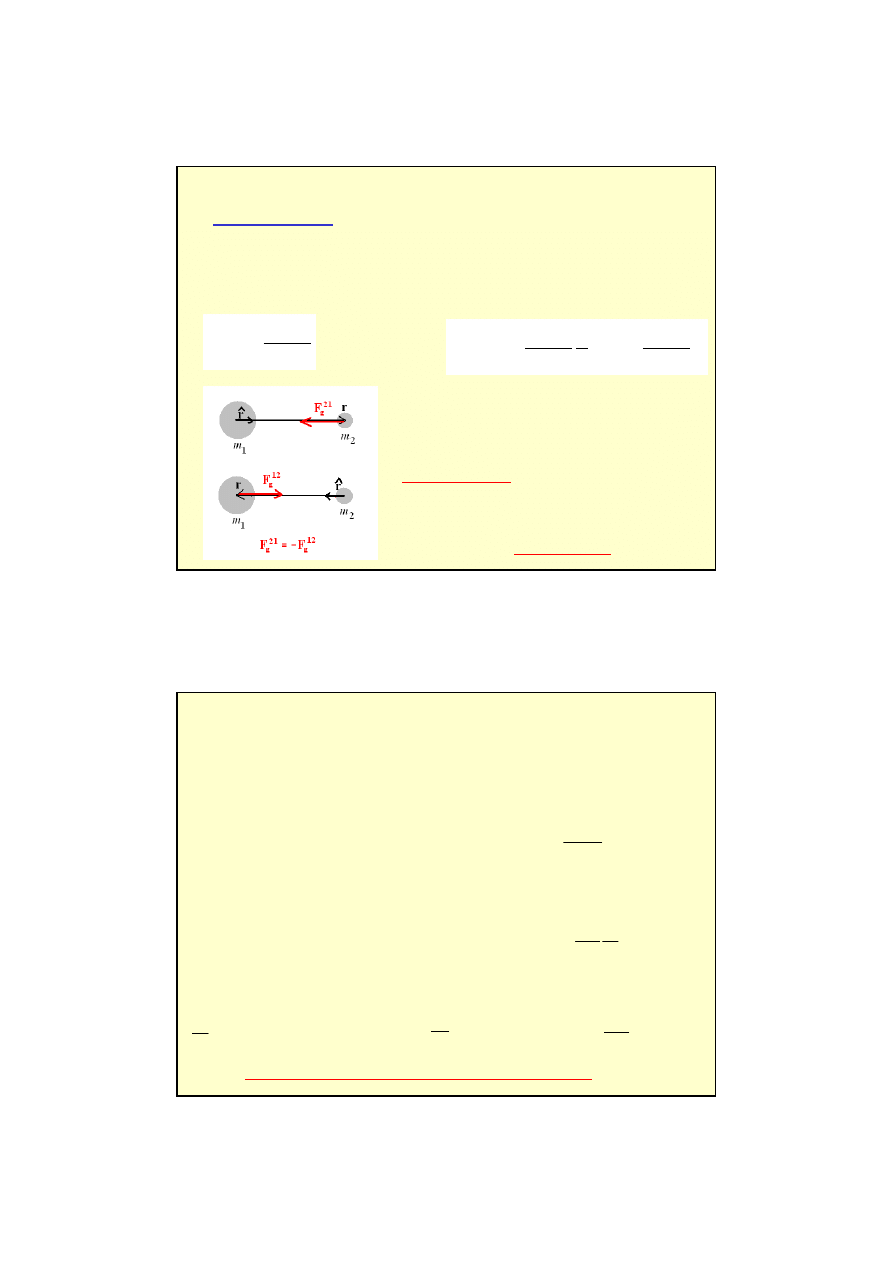
III.
Gdy dwa ciała oddziałują wzajemnie, to siła wywierana przez ciało drugie na ciało
pierwsze jest równa i przeciwnie skierowana do siły, jaką ciało pierwsze działa na
drugie (siła akcji równa jest sile reakcji).
F
akcji
F
reakcji
a)
B
A
F
AB
F
BA
b)
Reakcja na nacisk
* Ścisła definicja układu inercjalnego: jest to taki układ, w którym spełnione
są zasady dynamiki Newtona.
UWAGI:
* Mechanika klasyczna (newtonowska) jest szczególnym przypadkiem
ogólniejszych teorii:
Mechanika
kwantowa
Sczególna
teoria względnosci
Mechanika
klasyczna
c
v
<<
o
A
1
>>
l
BA
AB
F
F
−
=
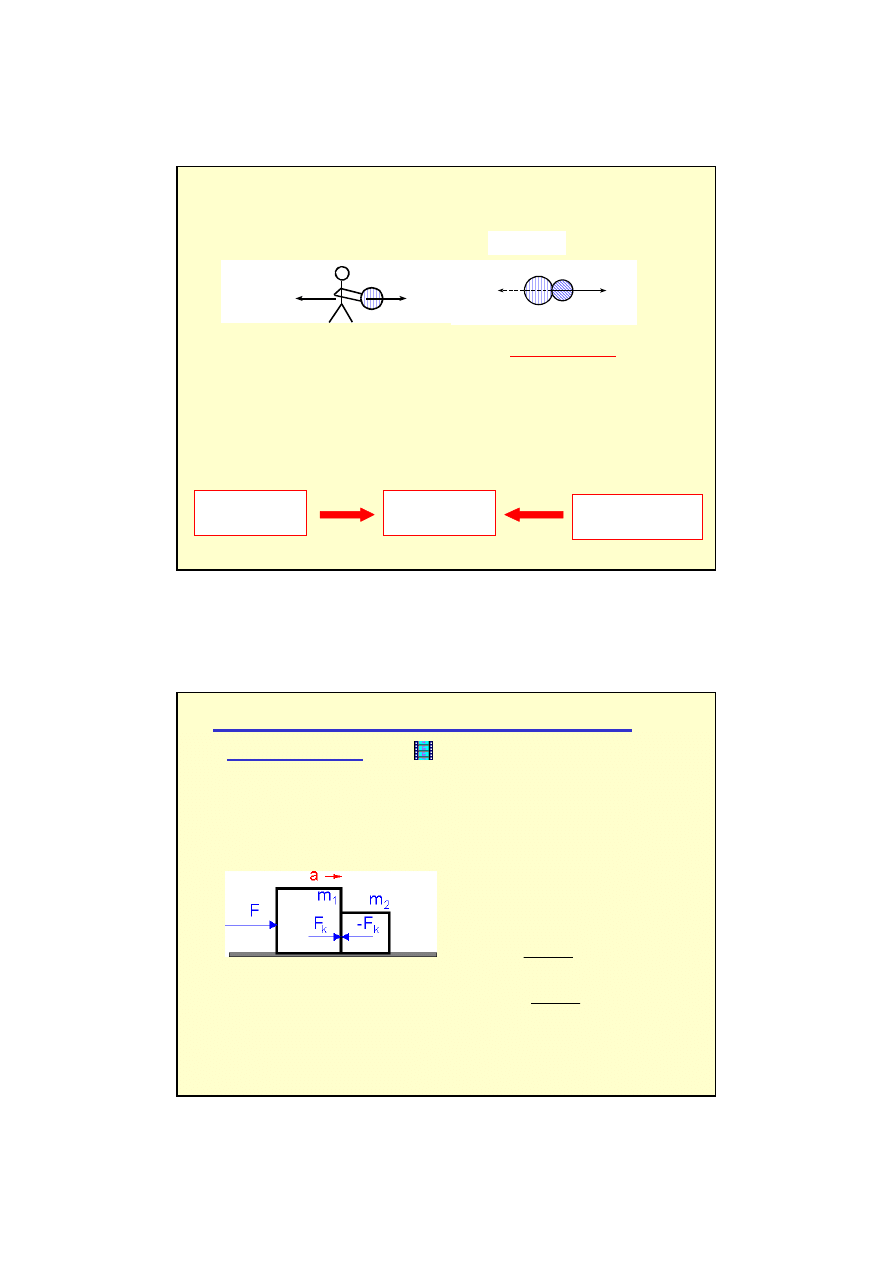
Siły kontaktowe
Gdy dwa ciała są dociskane do siebie to występują między nimi
siły kontaktowe
.
PRZYKŁADY SIŁ RZECZYWISTYCH
Źródłem tych sił jest odpychanie pomiędzy atomami, jest to siła elektromagnetyczna.
a
a
F
1
2
m
m
=
−
Siła kontaktowa
F
k
to siła z jaką klocek o masie m
1
działa na klocek o masie m
2
nadając mu przyspieszenie.
=
=
−
a
F
a
F
F
2
1
m
m
k
k
+
=
+
=
F
F
F
a
2
1
2
2
1
m
m
m
m
m
k
5
Każde dwa ciała o masach m
1
i m
2
przyciągają się wzajemnie siłą grawitacji wprost
proporcjonalną do iloczynu mas, a odwrotnie proporcjonalną do kwadratu odległości
między nimi.
2
2
1
r
m
m
G
F
=
r
r
F
ˆ
2
2
1
2
2
1
r
m
m
G
r
r
m
m
G
g
−
=
−
=
lub wektorowo
Masy m
1
i m
2
występującą we powyższym wzorze
nazywamy masami grawitacyjnymi.
Siła grawitacji
Masa występująca w II zasadzie dynamiki
Newtona ( F=ma) to masa bezwładna.
Masa grawitacyjna jest źródłem oddziaływania
grawitacyjnego.
Siła grawitacji – masa grawitacyjna i bezwładna
Czy masa bezwładna i masa grawitacyjna ciała są sobie równe ???
Obliczamy przyspieszenia jakie uzyskuje masa
m (bezwładna)
spadająca swobodnie w
pobliżu powierzchni Ziemi.
ma
Q
=
II zasada dynamiki Newtona mówi, że:
m
m
R
M
G
a
Z
Z
'
2
=
Obliczamy przyspieszenie:
Masa grawitacyjna i bezwładna są sobie równe !!!
Doświadczalnie stwierdzono, że wszystkie ciała spadają (w próżni) w pobliżu Ziemi z tym
samym przyspieszeniem a = g.
const
m
m
=
'
dobierzmy G tak aby:
1
'
=
m
m
wtedy:
2
Z
Z
R
M
G
g
=
2
'
Z
Z
R
M
m
G
Q
=
Na masę
m’ (grawitacyjną)
działa siła ciężkości:
6
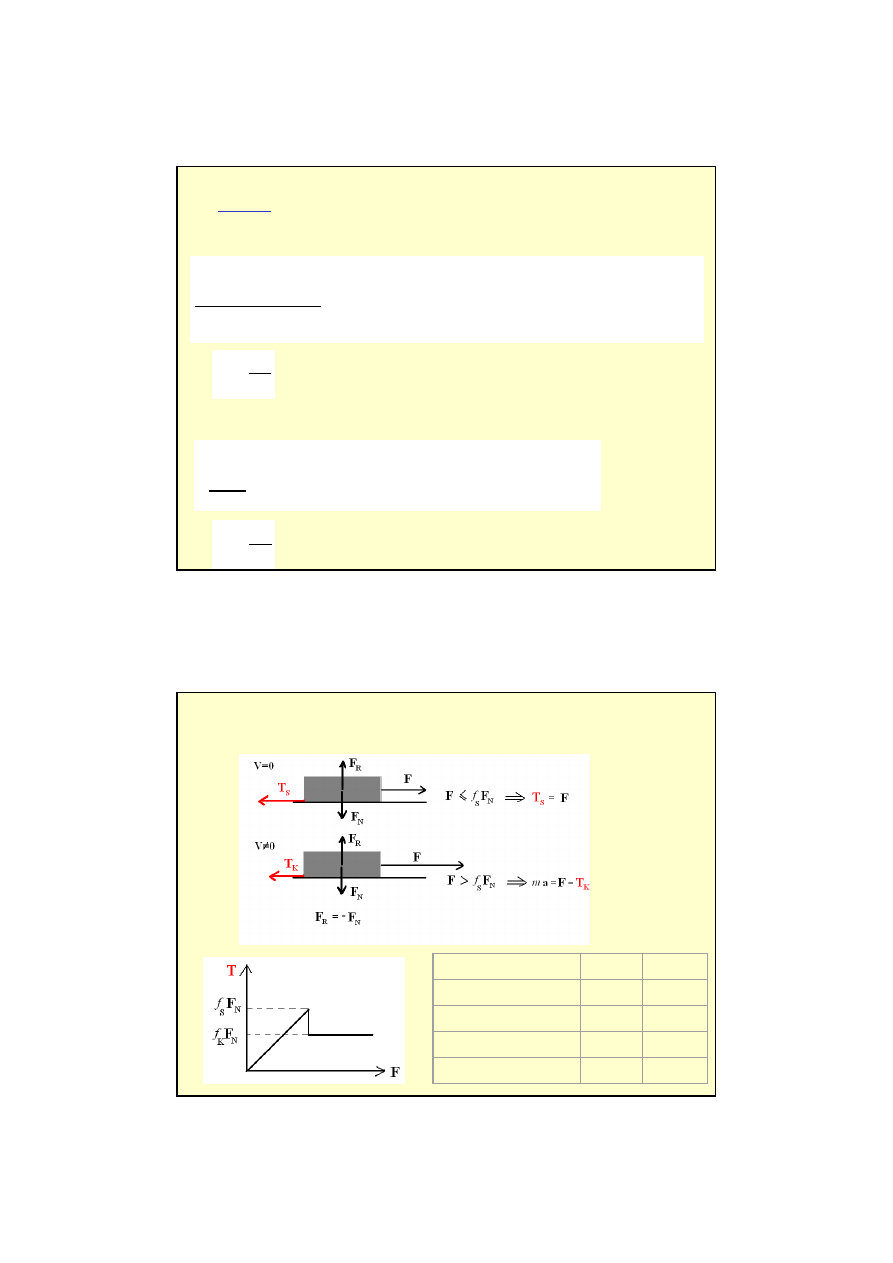
Siła tarcia zawsze działa stycznie do powierzchni zetknięcia ciał
• Siłę tarcia działającą między nieruchomymi powierzchniami nazywamy
tarciem statycznym T
s
Prawa dotyczące tarcia:
- T
s
jest w przybliżeniu niezależna od wielkości pola powierzchni styku ciał,
- T
s
jest proporcjonalna do siły z jaką jedna powierzchnia naciska na drugą.
N
s
s
F
T
f
=
Stosunek maksymalnej siły T
s
do siły nacisku F
N
nazywamy
współczynnikiem tarcia statycznego f
s
Tarcie
Stosunek siły T
k
do siły nacisku F
N
nazywamy
współczynnikiem tarcia kinetycznego f
k
• Gdy ciało porusza się, to mamy do czynienia z siłą
tarcia kinetycznego T
k
Prawo:
T
k
nie zależy od prędkości względnej poruszania się powierzchni.
N
k
k
F
T
f
=
Tarcie – przykład 1
Rodzaj powierzchni
f
s
f
k
Stal po stali
0.15
0.03- 0.09
Drewno po drewnie
0.54
0.34
Drewno po kamieniu
0.7
0.3
Stal po lodzie (np. łyżwy)
0.027
0.014
7
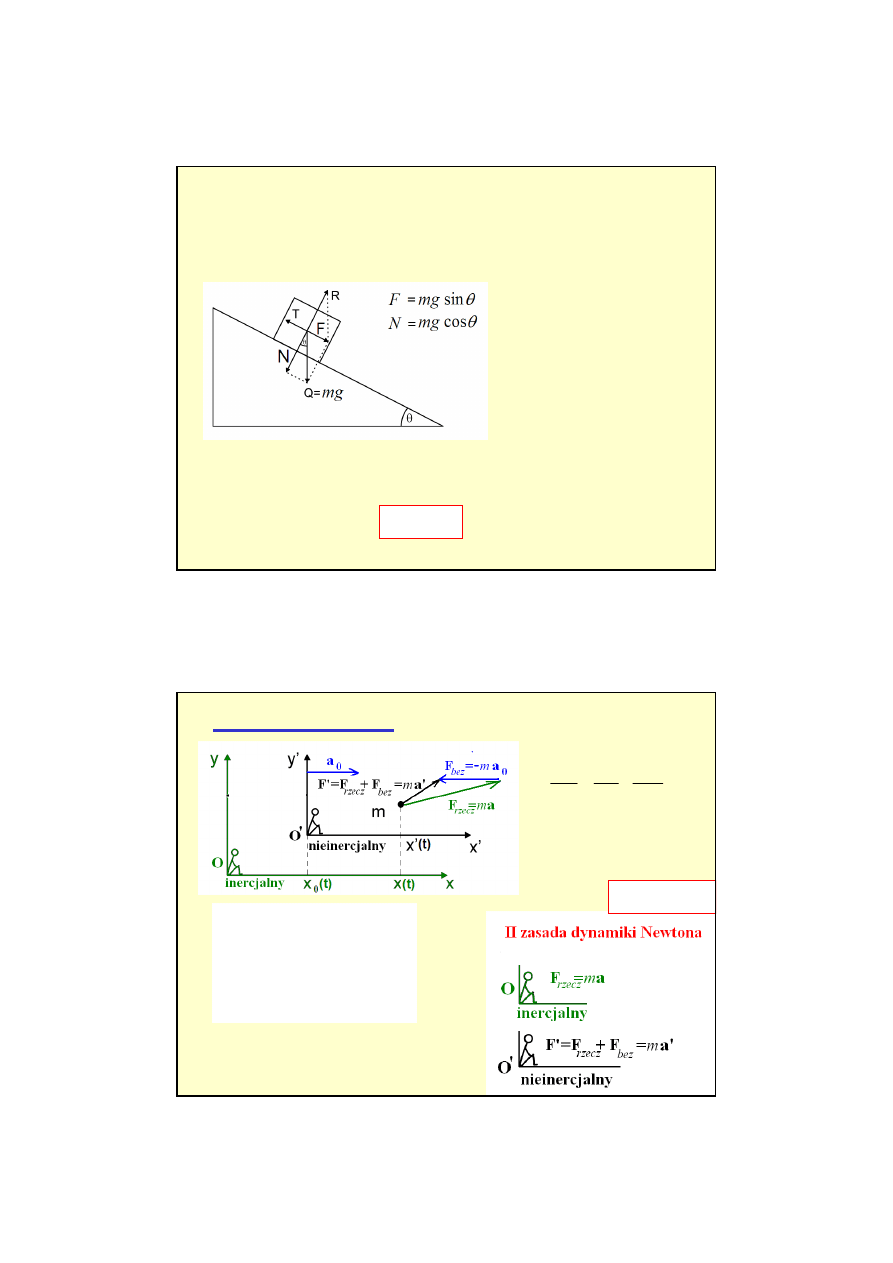
Tarcie – przykład 2
Ciało o masie m spoczywa na równi pochyłej, której kąt nachylenia θ stopniowo zwiększamy.
Przy jakim granicznym kącie nachylenia ciało zacznie się zsuwać jeżeli współczynnik
tarcia statycznego klocka o równię wynosi f
s
?
θ
cos
Q
f
T
s
=
=
=
θ
θ
cos
sin
Q
N
Q
F
θ
tg
f
s
<
θ
θ
sin
cos
Q
Q
f
F
T
s
<
⇒
<
ciało zsuwa się
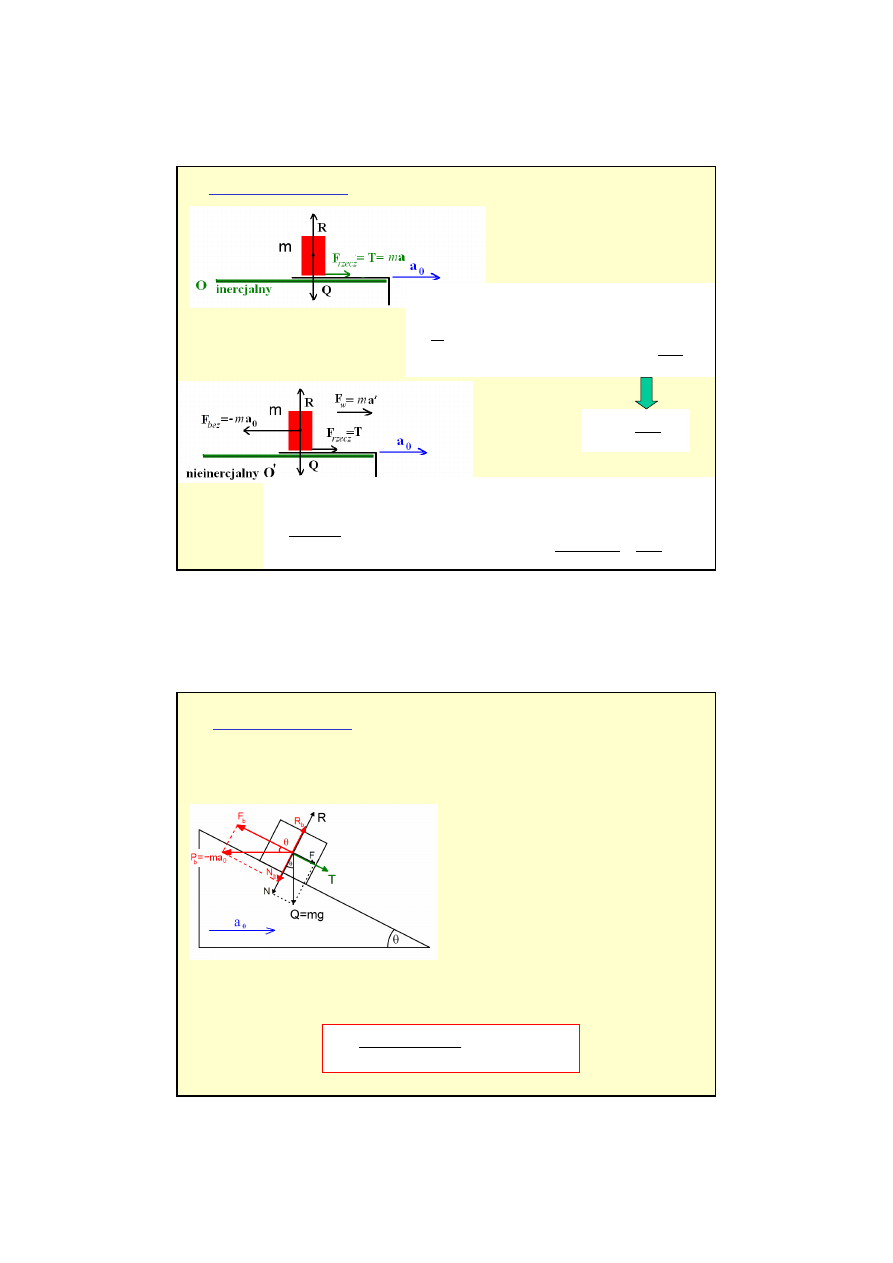
SIŁY POZORNE
0
bez
a
F
m
−
=
)
(
)
(
)
(
'
0
t
x
t
x
t
x
−
=
0
'
a
a
a
−
=
2
0
2
2
2
2
2
'
t
d
x
d
t
d
x
d
t
d
x
d
−
=
bez
rzecz
0
0
F
F
a'
a
a
a'
a
a
a'
+
=
−
+
=
−
=
m
m
m
m
)
(
Iloczyn masy i przyspieszenia
unoszenia (ze znakiem minus)
nazywamy siłą bezwładności F
bez
.
8
Uzupełnienie definicji układu inercjalnego: jest to taki układ, w którym spełnione są
zasady dynamiki Newtona i nie istnieją siły pozorne.
• Układy inercjalne poruszają się względem siebie ruchem jednostajnym
prostoliniowym lub pozostają w spoczynku.
• W układach inercjalnych ruchem ciał rządzą dokładnie te sama prawa.
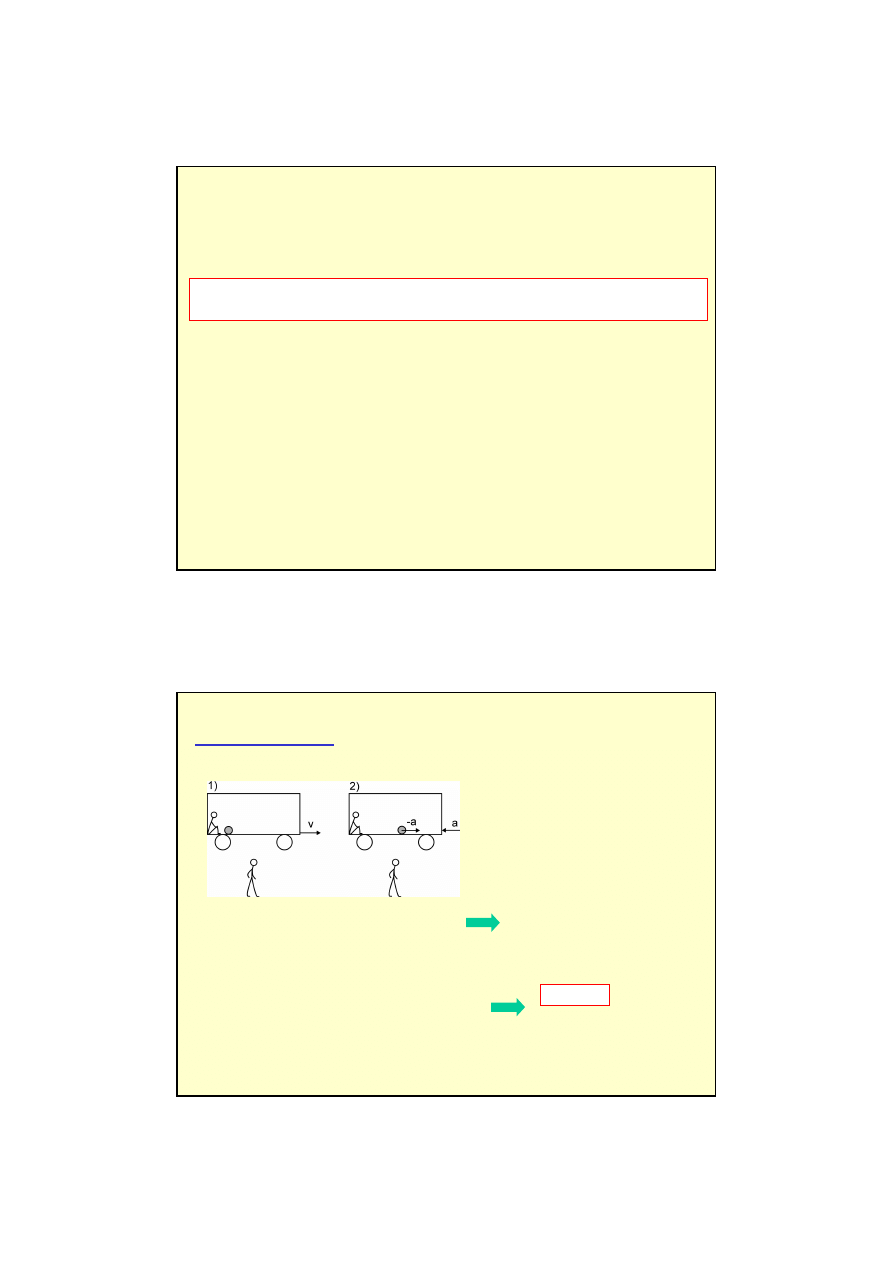
Ruch prostoliniowy
- dwaj obserwatorzy opisuj
ą
ruch kulki znajduj
ą
cej si
ę
w samochodzie
jeden z obserwatorów stoi na Ziemi,
a drugi znajduje się w samochodzie,
samochód jedzie ze stałą prędkością (rys. 1)
v
kulki
= 0 ⇒
⇒
⇒
⇒ F = 0
(O’ )
v
kulki
= v = const. ⇒
⇒
⇒
⇒ F = 0
(O)
(obserwatorzy O i O’ znajdują się w inercjalnych układach odniesienia)
samochód hamuje ze stałym opóźnieniem a (rys. 2),
(między kulką, a podłogą samochodu nie ma tarcia)
a
F
kulki
m
−
=
(O’)
(obserwator O’ znajduje się w układzie nieinercjalnym a obserwator O jest w układzie inercjalnym)
v
kulki
= v = const. ⇒
⇒
⇒
⇒ F = 0 (O)
O
O
O’
O’
9
<
=
⇒
=
⇒
>
=
⇒
=
⇒
≤
⇒
=
=
0
0
0
0
0
a
m
Q
f
a
Q
f
T
Q
f
ma
a
a
ma
T
Q
f
ma
m
m
T
a
a
T
<
−
=
−
=
⇒
=
⇒
>
=
⇒
=
⇒
≤
⇒
−
=
−
=
=
+
0
'
0
'
'
'
0
0
0
0
0
0
0
a
m
Q
f
m
ma
Q
f
a
Q
f
T
Q
f
ma
a
ma
T
Q
f
ma
m
m
m
m
a
T
a
a
F
a
F
T
bez
bez
0
0
a
m
Q
f
a
a
−
=
−
Ruch prostoliniowy
- wyrywanie obrusu
Z jakim przyspieszeniem poziomym powinna poruszać się w kierunku poziomym równia aby
ciało zaczęło się po niej wsuwać do góry ?
=
=
θ
θ
sin
cos
0
0
ma
N
ma
F
b
b
)
cos
sin
(
0
max
θ
θ
mg
ma
f
T
s
+
=
=
=
θ
θ
cos
sin
mg
N
mg
F
)
cos
sin
sin
cos
0
0
θ
θ
θ
θ
mg
(ma
f
mg
ma
s
+
>
−
ctgθ
f
g
θ
f
θ
θ
θ
f
a
s
s
s
<
−
+
>
i
sin
cos
sin
cos
0
Ruch prostoliniowy
– tarcie i bezwładność
10
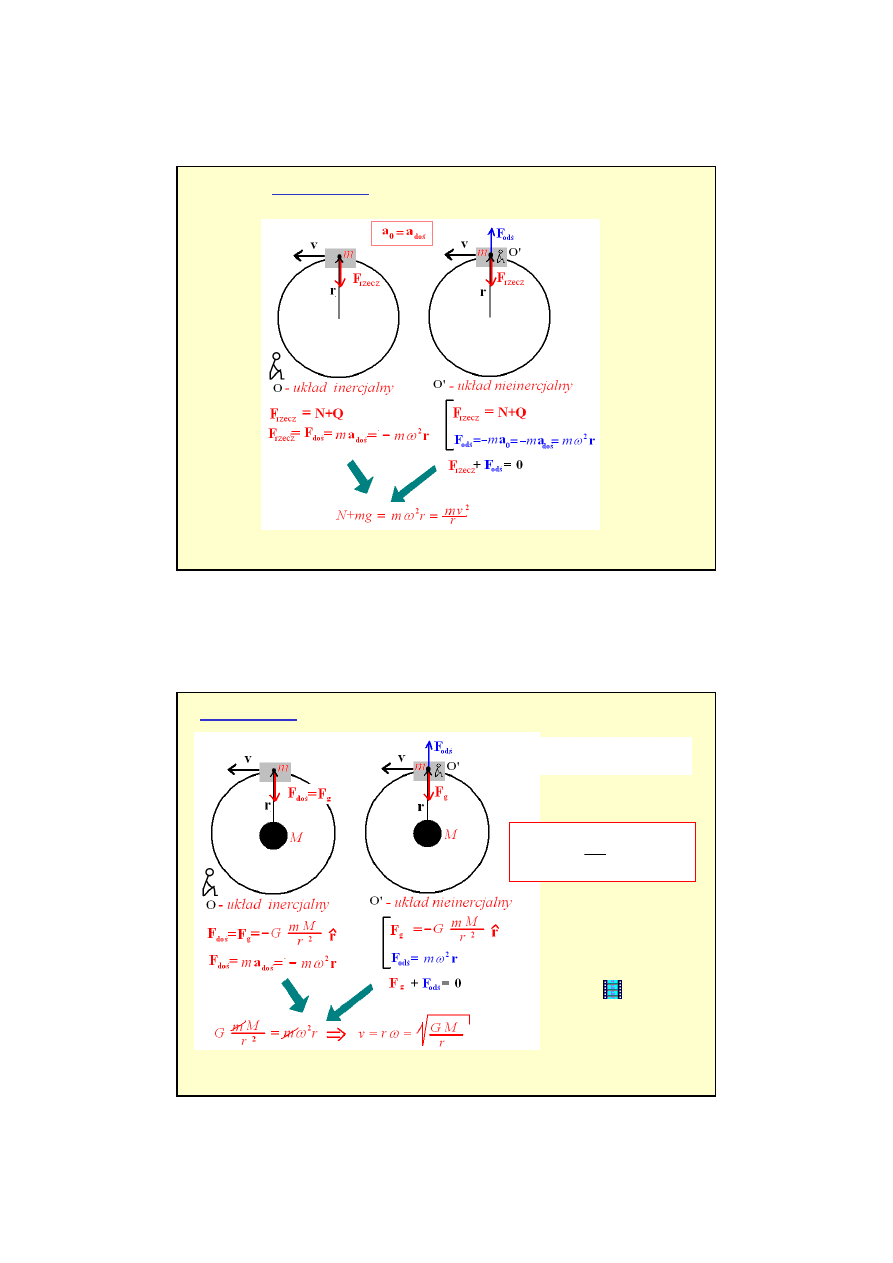
Siła odśrodkowa
- kamień na sznurku
Siła odśrodkowa
– stan nieważkości
r
r
F
odś
2
2
ˆ
ω
m
r
v
m
=
=
jeden z obserwatorów (O) stoi na Ziemi,
a drugi znajduje się w sputniku (O’)
11
Biedronka porusza się wzdłuż
promienia tarczy ze stałą prędkością v
r
(względem tarczy !!)
Obserwator w układzie
inercjalnym
(zewnętrznym) widzi
przyspieszenia:
a
1
- zmieniające kierunek
prędkości v
r
,
a
2
- zwiększające
prędkość styczną v
s
.
φ
∆
=
∆
r
r
v
v
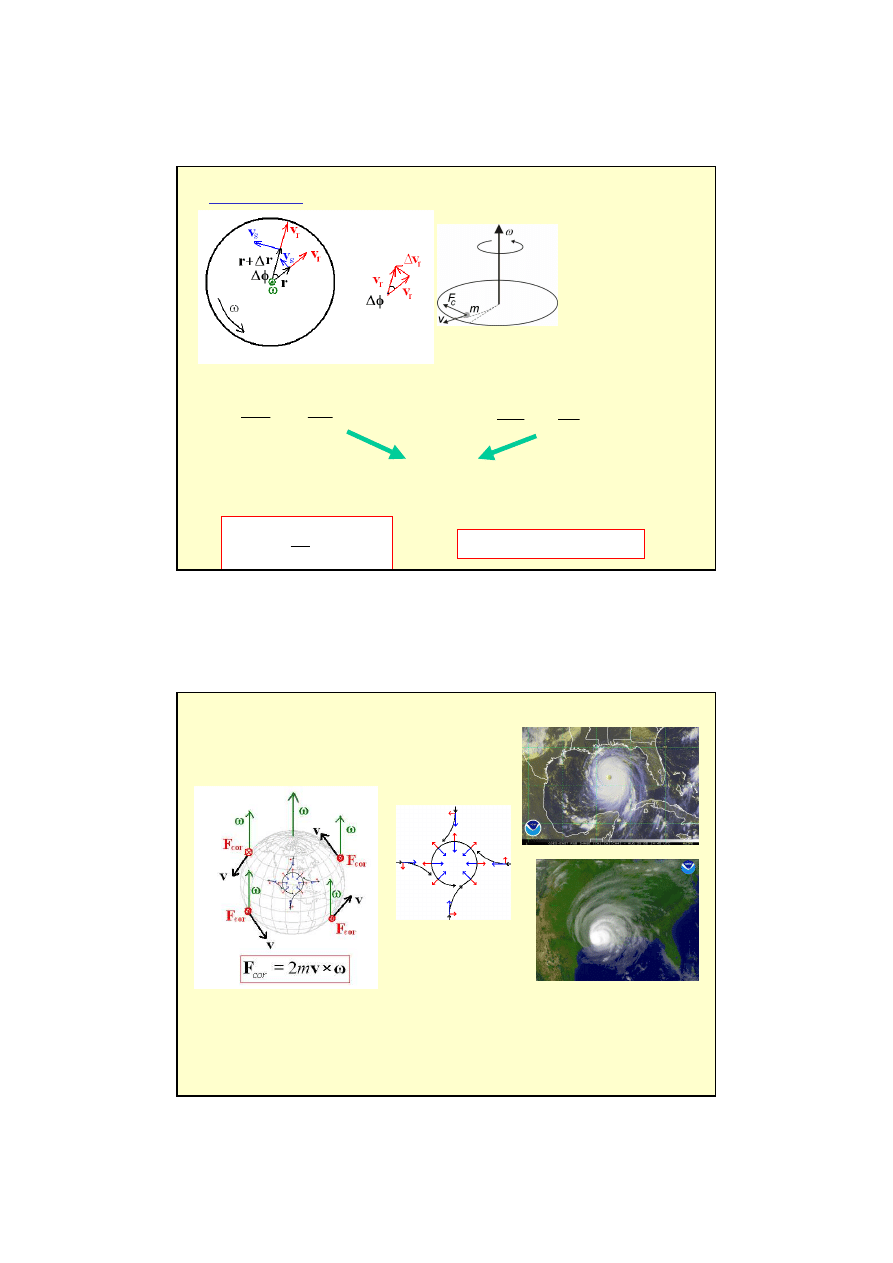
Siła Coriolisa
r
r
F
odś
2
2
ˆ
ω
m
r
v
m
=
=
ω
v
a
F
cor
cor
×
=
−
=
m
m
2
Siły bezwładno
ś
ci działaj
ą
ce w układzie obracaj
ą
cym si
ę
:
r
s
2
d
d
d
d
v
t
r
t
v
a
ω
ω
=
=
=
r
r
r
r
v
∆
=
−
∆
+
=
∆
ω
ω
ω
)
(
)
(
s
ω
φ
r
r
r
1
d
d
d
v
t
d
v
t
v
a
=
=
=
ω
r
cor
v
a
a
a
a
2
2
1
0
=
+
=
=
przyspieszenie Coriolisa
Mieszkamy na Ziemi – wirującej planecie
Ruch obrotowy Ziemi powoduje zmianę kierunku poruszających się po jej powierzchni ciał.
• silniejsze podmywanie prawych brzegów rzek na półkuli północnej i lewych na
półkuli południowej
• odchylenie kierunków wiatrów stałych
• układ prądów morskich
• odchylenie toru ciał spadających
RITA 2005
KATRINA 2005
Siła Coriolisa
na Ziemi
12
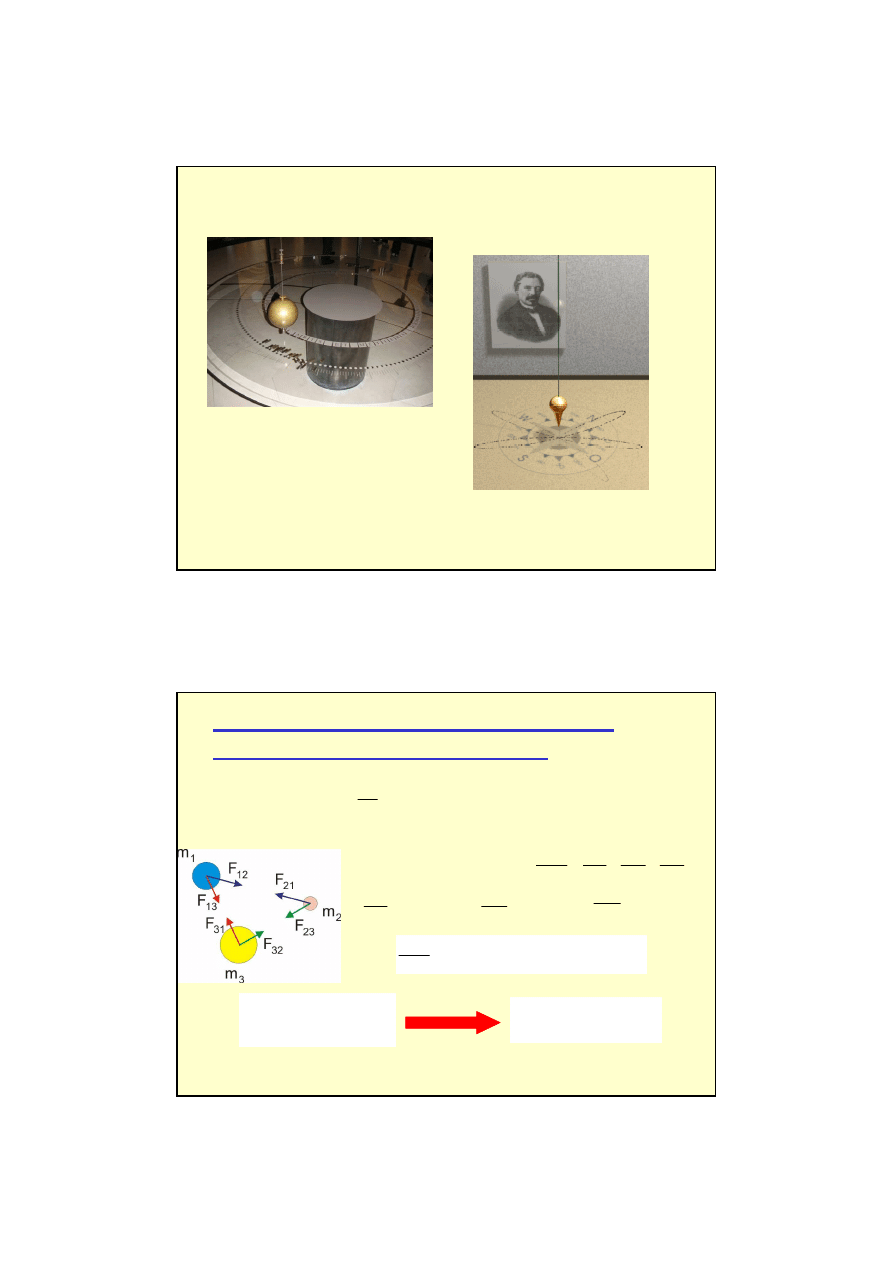
Siła Coriolisa
- wahadło Foucaulta
Wahadło Foucaulta w Muzeum Sztuk i Rzemiosł
w Paryżu; w miarę obrotu wahadło przewraca
ustawione wokoło klocki.
Wahadło Foucaulta - Kościół św. Piotra i Pawła w Krakowie: 46,5m , 25 kg
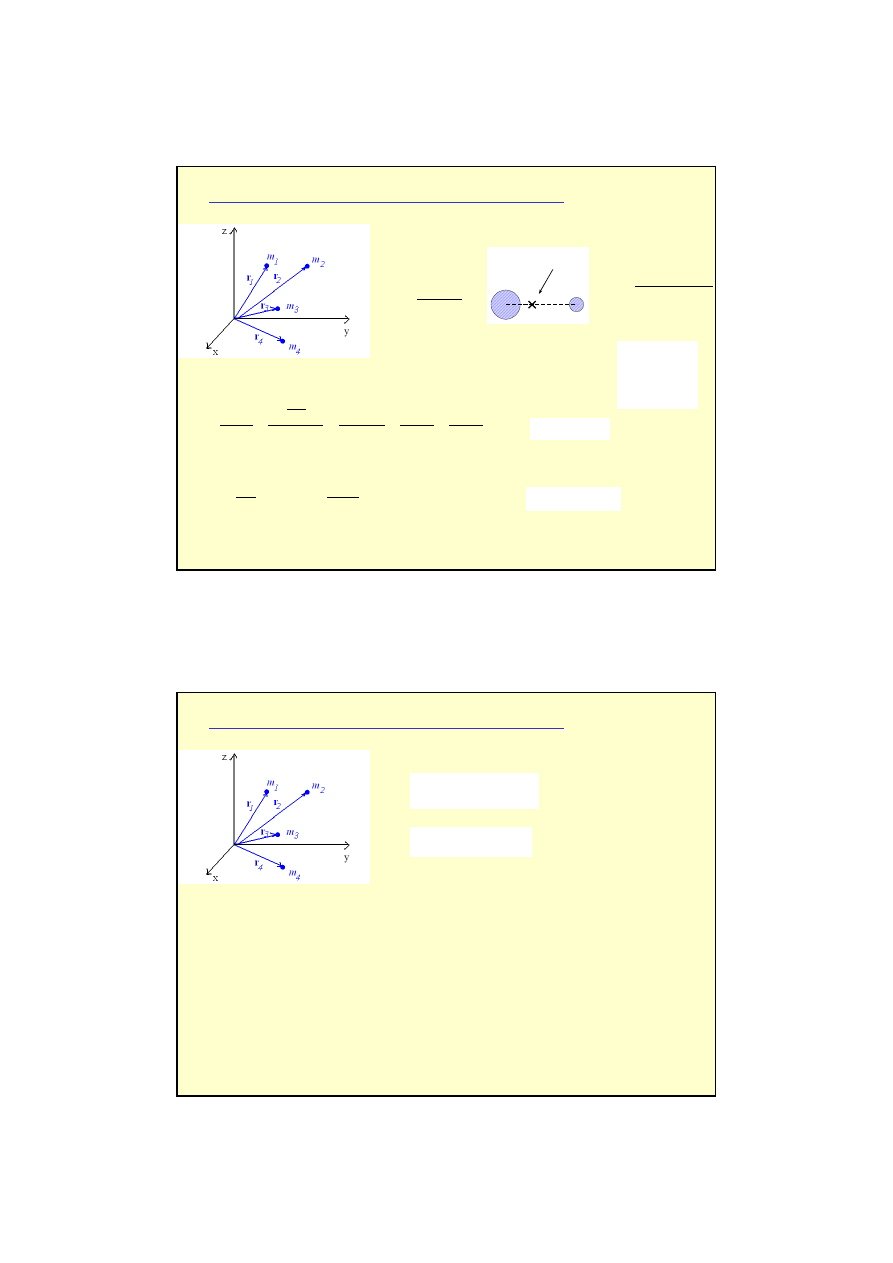
ZASADY DYNAMIKI DLA UKŁADU
PUNKTÓW MATERIALNYCH
Jeżeli wypadkowa sił zewnętrznych działających na układ jest równa
zeru, to całkowity wektor pędu układu pozostaje stały.
const
=
cał
p
0
.
=
∑
zewn
F
const
dt
d
wyp
=
⇒
=
⇒
=
=
∑
p
p
F
F
0
0
Punkt materialny:
3
2
1
p
p
p
p
cał
+
+
=
13
12
1
F
F
p
+
=
dt
d
23
21
2
F
F
p
+
=
dt
d
32
31
3
F
F
p
+
=
dt
d
dt
d
dt
d
dt
d
dt
d
3
2
1
p
p
p
p
cał
+
+
=
0
32
23
31
13
21
12
=
+
+
+
+
+
=
F
F
F
F
F
F
p
cał
dt
d
Układ punktów materialnych:
13
Ś
rodek masy – zasady dynamiki Newtona
m
m
=
i
N
=1
i
i
N
=1
i
∑
∑
r
R
i
sm
m
+
m
m
+
m
=
2
1
2
1
r
r
R
2
1
sm
ś
rodek masy
∑
∑
∑
∑
∑
∑
∑
=
=
=
=
=
=
=
=
=
=
=
=
N
i
i
N
i
i
N
i
N
i
i
N
i
i
N
i
i
N
i
i
m
m
m
m
m
m
dt
dt
d
1
1
1
1
1
1
1
d
ca ł
i
i
i
sm
sm
p
p
v
r
R
V
sm
sm
a
V
F
P
M
dt
d
M
dt
d
zew
=
=
=
⇒
sm
a
F
M
zew
=
siła zewnętrzna powoduje przyspieszenie sm
⇒
∑
=
=
N
i
i
m
M
1
oznaczmy:
sm
V
P
M
=
całkowity pęd = pęd sm
cał
p
P
=
Opis układu wielu ciał staje się bardzo prosty i sprowadza się
formalnie do takich samych wzorów jak dla pojedynczej cząstki pod
warunkiem, że zastąpimy prędkość, pęd i przyspieszenie cząstki
przez te same wielkości, ale odniesione do środka masy.
∑
=
=
N
i
i
m
M
1
M
sm
V
P
=
sm
a
F
M
zew
=
Ś
rodek masy – zasady dynamiki Newtona
0
P
p
V
v
V
(v
p
i
sm
i
sm
i
sm
i
=
−
=
−
=
−
=
∑
∑
∑
∑
∑
=
=
=
=
=
N
i
N
i
N
i
i
i
N
i
N
i
i
m
m
m
1
1
1
1
1
)
Suma pędów cząstek względem środka masy wynosi 0 !!
∑
=
N
i 1
sm
i
p
14
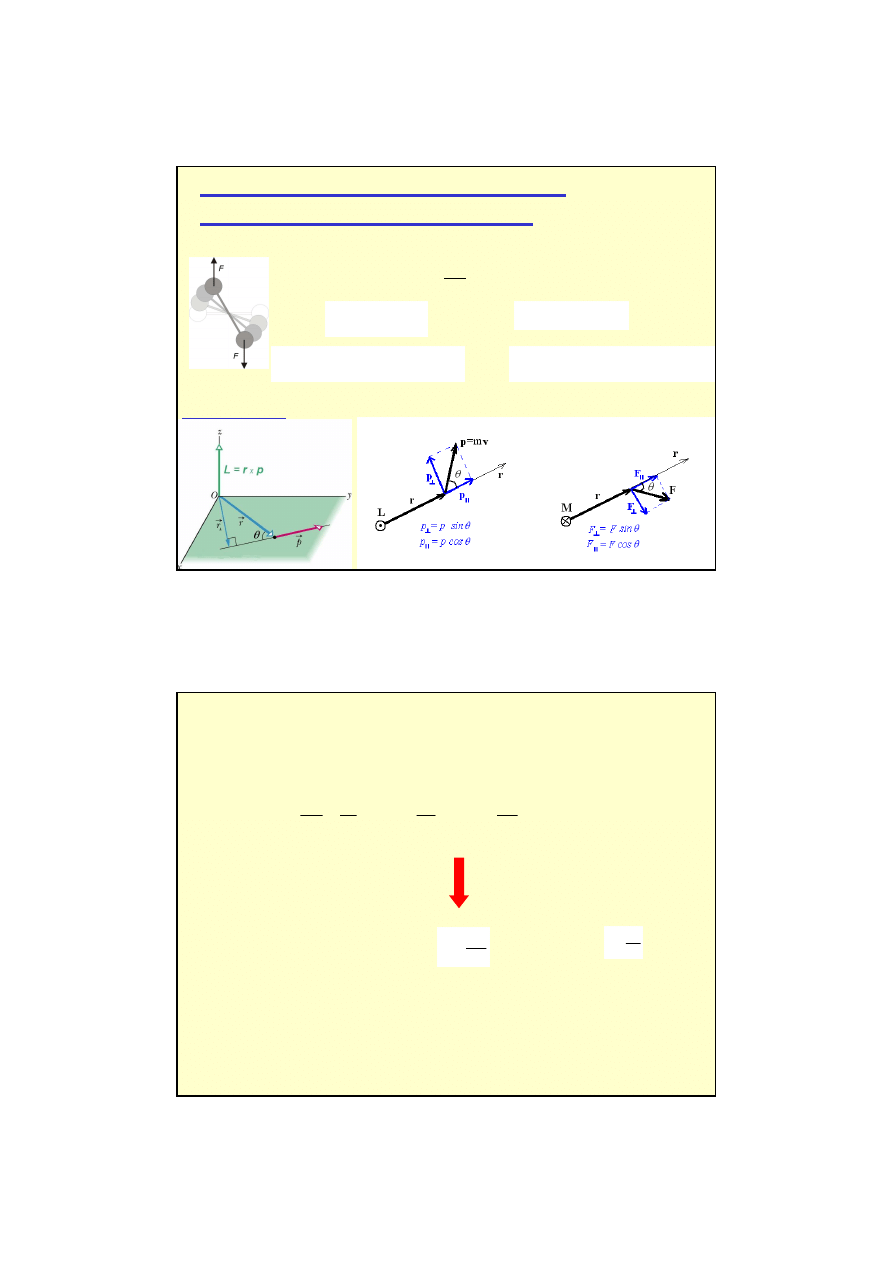
Pomimo, że siła wypadkowa = 0 to ciało może być wprawione w ruch - obrót
ZASADY DYNAMIKI NEWTONA
DLA RUCHU OBROTOWEGO
0
=
wyp
F
0
d
d
=
t
p
0
=
a
p
r
L
×
=
⊥
=
=
p
r
p
r
L
θ
sin
Wielkościami, używaną do opisu ruchu obrotowego są:
moment pędu L (analogiczny do pędu) i moment siły M (analogiczny do siły)
F
r
M
×
=
⊥
=
=
F
r
F
r
M
θ
sin
(
)
F
r
p
v
p
r
p
r
p
r
L
×
+
×
=
×
+
×
=
×
=
t
d
d
t
d
d
t
d
d
t
d
d
0
=
×
⇒
p
v
p
v
II
t
d
dL
M
=
Zmiana pędu w czasie jest równa sile (F), a zmiana momentu pędu w czasie
momentowi siły (M).
t
d
dp
F
=
II zas. dynamiki Newtona:
Druga zasada dynamiki dla ruchu obrotowego:
15
STATYKA: Aby ciało było w równowadze suma sił zewnętrznych i momentów sił
zewnętrznych musi być równa zeru
const.
t
wyp
=
⇒
=
⇒
=
p
p
F
0
d
d
0
Zasada zachowania pędu :
const.
t
wyp
=
⇒
=
⇒
=
L
L
M
0
d
d
0
Zasada zachowania momentu pędu :
ZASADY ZACHOWANIA:
PĘDU I MOMENTU PĘDU
Punkt materialny:
Układ punktów materialnych:
const.
t
=
⇒
=
⇒
=
∑
cał
cał
zew
p
p
F
0
d
d
0
Zasada zachowania pędu :
const.
t
=
⇒
=
⇒
=
∑
cał
cał
zew
L
L
M
0
d
d
0
Zasada zachowania momentu pędu :
Przykład zasady zachowania p
ę
du
-
napęd odrzutowy (ruch rakiety)
x
u
m
y
v
)
( gazów
dm
u
dv
m
=
W układzie zwi
ą
zanym z rakiet
ą
:
dm
u
dv
m
−
=
ponieważ masa rakiety zmniejsza się o
)
( gazów
dm
dm
−
=
m
dm
u
dv
−
=
⇒
[ ]
m
m
v
v
m
m
o
o
o
m
u
m
dm
u
dv
∫
∫
−
=
−
=
'
ln
'
'
'
Jaki musi być stosunek masy początkowej do końcowej m
o
/m rakiety, aby osiągnęła ona
pierwszą prędkość kosmiczną (v = 7.9 km/s) ? Przyjąć typową prędkość wyrzucanych gazów:
u= 3 km/s.
Odp. m
o
/m = 14
)
ln
(ln
o
o
m
m
u
v
v
−
−
=
−
m
m
u
v
v
o
o
ln
+
=
Wzór Ciołkowskiego
⇒
16
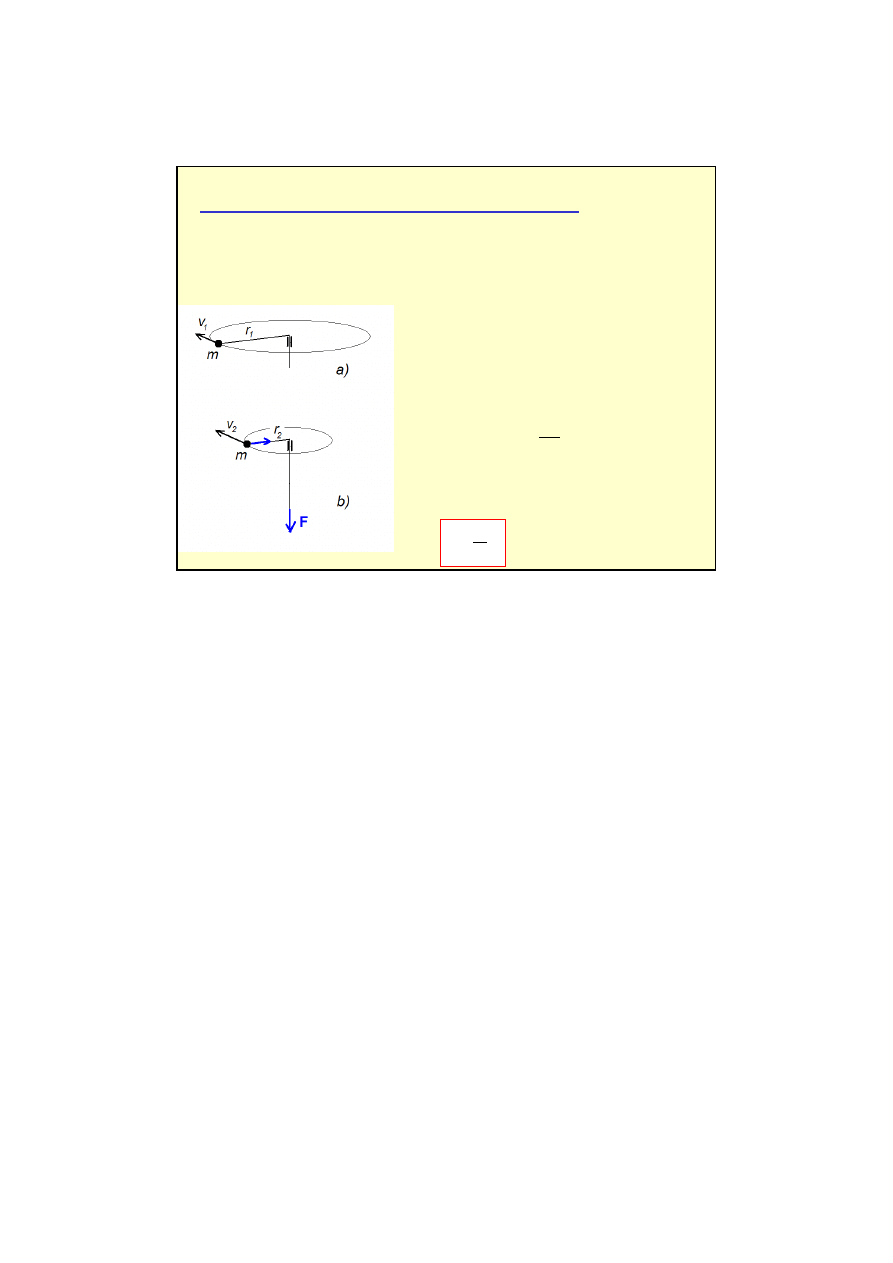
Przykład zasady zachowania momentu p
ę
du
Ciało o masie m porusza się w płaszczyźnie poziomej po okręgu o promieniu r
1
(a). Prędkość
liniowa ciała wynosi v
1
. Ile razy zmieni się prędkość liniowa ciała, jeśli pociągając za sznurek
jak na rys (b) zmniejszymy promień okręgu do długości r
2
(b) . Zakładamy, że nie działa siła
grawitacji.
a)
1
1
v
r
m
L
m
=
=
1
1
v
r
L
x
1
1
v
r
⊥
const.
0
d
d
0
=
⇒
=
⇒
=
=
L
L
F
r
M
1
t
x
b)
siła F działa wzdłuż sznurka i zawsze prostopadle
do prędkości ciała , czyli:
F
r
1
||
2
2
1
1
v
r
m
v
r
m
L
=
=
1
2
1
2
v
r
r
v
=
Wyszukiwarka
Podobne podstrony:
2 IMIR przyklady dynamikaid 203 Nieznany (2)
07 Reakcje dynamiczneid 6948 Nieznany (2)
4 Statyczne i dynamiczne wlasci Nieznany
2 dynamikaid 20278 Nieznany (2)
Podstawowe czlony dynamiczne id Nieznany
03 Druga zasada dynamiki & Rown Nieznany (2)
Druga zasada dynamiki Newtona i Nieznany
2 Podstawy dynamikiid 20628 Nieznany (2)
2 IMIR przyklady dynamikaid 203 Nieznany (2)
obciazenie praca dynamiczna teo Nieznany
czlony dynamiczne id 128806 Nieznany
zestaw 5 dynamika punktu materi Nieznany
4 Dynamika bryly sztywnej id 37 Nieznany (2)
Lab5 Modelowanie dynamiki id 25 Nieznany
7 Dynamika ruchu obrotowego bry Nieznany
Dynamika id 145246 Nieznany
analiza dynamiczna obiektow mec Nieznany
5 dynamika ciala sztywnego id Nieznany (2)
cwiczenie 5 sorpcja dynamiczna Nieznany
więcej podobnych podstron