Miernik magnetoelektryczny
Budowa ustroju:
Częścią nieruchomą ustroju
magnetoelekt. jest magnes
trwały. Częścią ruchomą
ustroju jest cewka umieszczona w polu mag. magnesu trwałego między dwoma nabiegunnikami NB wykonanymi tak jak i rdzeń z materiału magnetycznie miękkiego w celu zapewnienia radialnego rozkładu pola mag. między nabiegunnikami. Rdzeń jest umieszczony wewnątrz sztywnej ramki, na którą jest nawinięta drutem miedzianym cewka. Natomiast do ramki jest przytwierdzona wskazówka odzwierciedlająca ruch cewki względem podziałki.
Wyprowadzenie wzoru na odchylenie organu ruchomego:
Na każdy przewód o dł. dl przez który płynie prąd o natężeniu I umieszczony w polu mag. o indukcji B działa siła elektrodynamiczna dF→= I dl→ x B→ (x - iloczyn wektorowy) a→ x b→ = |a| |b| sin(kąta a,b).
Jeżeli mamy przewód o dł. l to siła F→=I l→ x B→ to F→=I |l| |B| sin(l,B). Jeżeli ramka ustawi się prostopadle do lini sił pola mag. to F= I l B sin90 =I l B.
Jeżeli cewka ma N zwojów, to FN=NF= N I l B. Pod wpływem tej siły ramka zaczyna się obracać, czyli powstaje moment siły M=FN d gdzie d- szer. ramki, M- moment siły, zwany momentem napędowym. M=FN d=I N B l d
Ponieważ l d =S (S- przekrój) mamy: M= I N S B.
Temu momentowi napędowemu przeciwdziała moment zwracający MZ= k*alfa. W momencie ustalonego położenia wskazówki na skali miernika oba momenty się równoważą, czyli są sobie równe, ale przeciwnie skierowane, czyli otrzymujemy następującą zależność:
…
Wniosek
Odchylenie organu ruchomego miernika magnrtoelekt. jest wprostproporcjonalne do wielkości mierzonej np. U,I ipodziałka miernika magnetoelekt. jest równomierna. Z miernika magnetoelekt. korzystamy przy prądzie stałym, natomiast jeżeli chcemy korzystać z miernika przy prądzie przemiennym to należy stosować układy prostownicze np. mostek Gretza.
Wiadomości dodatkowe:
Wyprowadzenie wzoru na błąd temperaturowy miernika magnetoelekt.
Przy wyprowadzaniu wzoru zakładamy, że prąd mierzony I ma stałą wartość, zaś błąd δt definiujemy jako względny przyrost odchylenia Δalfa spowodowany przez przyrost temp. ΔT.
I = const.
k - współczyn. sprężystości materiału sprężyn; N - liczba zwojów cewki;
S - przekrój ramki z cewką; B - indukcja mag.
N,S,B,I = const.
RT = R0(1+βΔt)
β - współczynnik rozszerzalności cieplnej
kT = k0(1+βΔt) Δk = kT - k0
Δk = k0+ k0βΔt - k0 = k0βΔt
Wniosek
Błąd temp. jest wprost proporcjonalny do przyrostu temp. Im większy jest przyrost temp. Δt, tym mniejsze jest odchylenie organu ruchomego w stosunku do odchylenia rzeczywistego.
Rozszerzanie zakresów pomiarowych mierników magnetoelekt. Wyprowadzenie wzorów na rezyst. bocznika oraz posobnika.
a) Rozszerzanie zakresu woltomierza poprzez włączenie w szereg z ustrojem dodatkowego rezyst. (tzw. posownik)
R0 - rezyst. wewnętrzna ustroju
Rd - dodatkowy rezystor (tzw. posownik)
U = n U0 UR = I Rd U0 = I R0 U = U0 + UR
n U0 = U0 + I Rd n U0 = U0 + (U0 \ R0) Rd /:U0 n = 1 + Rd \ R0
Rd = R0 (n - 1)
b) Rozszerzanie zakresu amperomierza poprzez włączenie równolegle z ustrojem dodatkowego rezyst. (tzw. bocznik)
I = n I0 I = I0 + Ib I0 R0 = U0 = Ib Rb
Ib = I - I0 I0 R0 =( I - I0) Rb I0 R0 =( n I0 - I0) Rb
I0 R0 = I0 ( n - 1) Rb /: I0 R0 = ( n - 1) Rb Rb = R0 \ (n -1)
Ustrój elektromagnetyczny
Budowa ustroju
Częścią nieruchoma ustroju jest cewka nawinięta w dwóch sekcjach, do której jest doprowadzony Prąd mierzony. Częścią ruchomą jest rdzeń, do którego przymocowana jest wskazówka, i który zmienia swoje położenie względem cewki. Wiąże się to ze zmianą strumienia magnetycznego skojarzonego z cewką, gdyż przy wysuniętym rdzeniu strumień magnetyczny skojarzony z cewką jest dużo mniejszy.
2. Wyprowadzenie wzoru na odchylenie organu ruchomego.
Jeżeli przez cewkę płynie prąd o natężeniu I, w czasie dt, który spowodował spadek napięcia na cewce U, to oznacza, że w tym czasie do układu została dostarczona energia dAd=UIdt. Z drugiego prawa Kirhchoffa wynika, że suma wszystkich napięć w obwodzie równa się iloczynowi prądów oraz rezystancji ΣUi=IR (R - rezystancja cewki). Na sumę napięć składają się: napięcie na cewce oraz sem Et skojarzona z cewką, która powstaje na skutek zmian strumienia magnetycznego w cewce:
ponieważ:
dAd=UIdt=I2dL+I2Rdt
Energia dostarczana zostaje zużyta na:
- odchylenie organu ruchomego dAodch= M dα
- na wydzielenie ciepła dQ=I2Rdt
-na przyrost energii magnetycznej dWμ=(I2dL)/2
Moment zwracający
3. Wiadomości dodatkowe:
Błąd temperaturowy - przy wyprowadzaniu wzoru zakładamy stała wartość odchylenia α=const oraz indukcji L względem położenia organu ruchomego α.
Miarą błędu temperaturowego będzie względny przyrost natężenia prądu spowodowany zmianą temperatury: δt=(ΔI/I)*100%
Przy wyprowadzaniu wzoru na błąd temp. skorzystamy z zależności dotyczącej odchylenia organu ruchomego α, do której zastosujemy metodę pochodnej logarytmicznej
Wniosek
Wraz ze wzrostem temperatury rośnie wartość błędu temp, co wiąże się ze zmiana natężenia prądu płynącego w cewce - wartość prądu maleje.
Błąd częstotliwościowy - powodem powstania błędów częstotliwościowych w ustroju elektrycznym są prądy wirowe indukowane w częściach metalowych zbliżanych do cewki, jeżeli przez cewkę płynie prąd o dużej częstotliwości.
Jeżeli przez cewkę płynie prąd o natężeniu I, to w częściach metalowych ustroju indukuje się sem indukcji E=ωM12I, gdzie ω=2πf, M12 - indukcja wzajemna między cewką a elementami metalowymi.
Impedancja części metalowych: Zz=√(R22+L22ω2), gdzie: R2 - rezystancja części metalowych, L2 - indukcyjność własna części metalowych
W częściach metalowych zaczyna płynąć prąd wirowy równy:
Wykres wskazowy
Sem E jest opóźniona względem prądu płynącego w cewce o 90˚. Prąd I2 płynący w częściach metalowych jest opóźniony względem E o kąt γ. Punkt wektora natężenia I2 ma kierunek prądu I płynącego w cewce wyznacza składową I2 zwana składową. W rezultacie zamiast Mierzyc wartość rzeczywistą prądu I mierzymy wartość prądu I-Ir.
Błąd częstotliwości definiujemy jako:
Jeżeli f jest duża to ω=2πf→∞ i (R22/ω2)→0
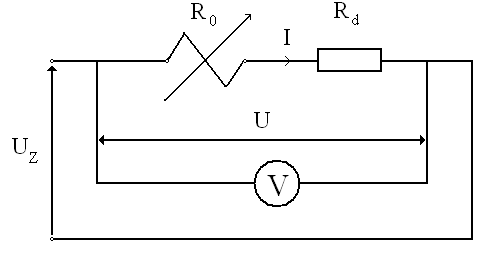
Omomierz magnetoelektryczny szeregowy
![]()
r0 - rezystancja wew. ustroju omomierza
R0 - rezys. wew. źródła nap.
E - nap. zasilające
Rs - rezyst.
Rx - rezyst. mierzona
Jeżeli zewrzemy zaciski pomiarowe x - x wówczas w obwodzie popłynie prąd max. Ixmax = E / (R0 + r0 + Rs) , gdzie R0, r0, Rs, E = const.
Po włączeniu do układu mierzonej rezyst. Rx wartość prądu będzie równa
Ix = E / ( R0 + r0 + Rs + Rx )
Ix / Ixmax = E / (R0 + r0 + Rs) / E / (R0 + r0 + Rs + Rx) = (R0 + r0 + Rs) / R0 + r0 + Rs + Rx)
R0 + r0 + Rs = R = const.
Ix / Ixmax = R / ( R + Rx )
Dla ustroju elektromag. odchylenie organu ruchomego jest wprost proporcjonalne do wielkości mierzonej.
αxmax = C1 * Ixmax
αx = C1 * Ix
αx / αxmax = ( C1 * Ix) / (C1 * Ixmax) = Ix / Ixmax
αx / αxmax = R / (R + Rx)
αx = αxmax * R / (R + Rx)
Wyznaczanie charakterystycznych punktów na charak.
Rx = 0 , to αx = αxmax * R / ( R + 0 ) => αx = αxmax
Rx = ∞ , to αx = αxmax * R / ( R + ∞ ) => 0 = αx
Rx = R , to αx = αxmax * R / ( R + R ) => αx = ½ αxmax
Wnioski:
Maksymalnemu wychyleniu omomierza odpowiada wartośc mierzonej rezystancji Rx = 0 ( zwarte zaciski pomiarowe).
Dla odchylenia omomierza αx = 0 działek odpowiada wartość rezystancji mierzonej Rx = ∞ (otwarte zaciski pomiarowe x-x)
odchyleniu αx = ½ αxmax omomierza odpowiada wartość rezystancji mierzonej Rx = R.
Najdokładniejsze pomiary dotyczą środkowej skali omomierza.
Omomierz równoległy
W omomierzu równoległym mierzoną rezyst. Rx włącza się równolegle do ustroju.
Wprowadzenie wzoru na odchylenie wskazówki omomierza jest analogiczne jak w przypadku omomierza szeregowego, przy czym we wzorach należy uwzględnić położenie równoległe ustroju omomierza z rezystancją mierzoną Rx. Natomiast podziałka omomierza jest odwrotna niż w przypadku omomierza szereg. I wygląda następująco.
Przy zwartych zaciskach x-x omomierz równoległy (Rx = 0) odchylenie α x = ∞ , natomiast przy rozwartych zaciskach (Rx = ∞ ) omomierza wskazuje α x = 0.
dAd = UIdt = I2Rdt + I2dl
dEa = I2Rdt
dAodch = Mdα
dAμ = ½ I2dl
dAZ=I2Rdt + Mdα + ½ I2dl
dAd = dAZ
I2Rdt + I2dl = I2Rdt + Mdα + ½ I2dl
½ I2dl = Mdα
Energia zużyta na odchylenie organu ruchomego rówana się przyrostowi energii mag. Spowodowanemu przez to odchylenie.
moment napędowy: M = ½ I2 dl/ dα
moment zwracający: MZ = k * α
M = MZ
½ I2 dl/ dα= k * α
α= ½ * 1/k * I2 * dl/ dα= CI2
Ustrój elektrodynamiczny
W polu mag. Cewki nieruchomej zwanej cewką prądową porusza się cewka ruchoma zwana napieciowa do której jest przytwierdzona wskazowka odzwierciedlajaca ruch cewki względem podziałki. Cewke prądową włączamy do ustroju szeregowego, a cewke napieciową rownolegle. Z ustroju elektrody. można kożystac zarówno przy prądzie stalym jaki i przemiennym pod warunkiem ze do cewek zostanie doprowadzony prąd o tej samej czestotliwości.
2) Wyprowadzenie wzoru na odchylenie organu ruchomego.
Przy wyprowadzeniu wzoru korzystamy z twierdzenia które mówi ze energia zużyta na odchylenie organu ruchomego rowna się przyrostowi energii mag. spowodowanemu przez to odchylenie.
Energia mag. układu 2 cewek wyraża się wzorem:
I1 -prad w cewce nieruchomej
I2 -prąd w cewce ruchomej
L1 -indukcyjnosc wlasna cewki nieruchomej
L2 -indukcyjnosc własna cewki ruchomej
L3 -indukcyjnosc wzajemna obu cewek
Zakładając że: I1,I2, L1, L2, L3 = const.
-moment napędowy
Wniosek:
Odchylenie organu ruchomego ustroju dynamicznego jest wprost proporcjonalne do iloczynu prądów płynących w obu cewkach. Przy prądzie przemiennym odchylenie organu ruchomego ustroju elektrodynam. zależy od wartości średniej momentu napędowego.
M(t) - chwilowa wartość momentu napędowego.
Watomierz
Błąd kątowy watomierza
Indukcyjnośc własna cewki napięciowej jest rzedu kilku mH a t przy wyższych częstotliwościach może spowodowac ze kierunek prądu w cewce nap. Nie pokryje się z kierunkiem np. na cewce i będzie przesuniety o tąk „E”
Wskazanie watomierza będzie wieksze niż W rzeczywistości , bo bedzie zależało od kąta cos(φ-ε). ε-nazywamy błedem kątowym watomierza i aby go wyeliminowac włącza się równolegle do rezyst. R wlączonej w szereg z cewką nap. Kondensator o określonej wartości.
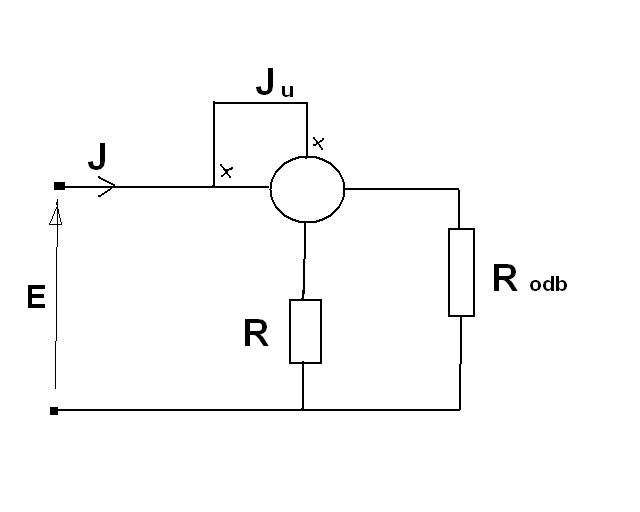
Waromierz (miernik do pomiar mocy biernej)
![]()
W waromierzu poprzez dobór odpowiednich elementów oraz połączenie, dokonuje się przesunięcia miedzy prądem a nap. w cewce nap. o 90 stopni.
Ukł. Hummala
Rc - rezyst. cewki nap.
Ustrój ferrodynamiczny
Φ - strumien mag. w szczelinie, wartość skuteczna.
Ψ - strumien mag. skojarzony z cewką ruchomą,wartośc skuteczna
Z2 - Liczba zwojów cewki ruchomej
α - odchylenie cewki ruchomej
I1 - prąd w cewce nieruchomej
Ustroje ferrodynamiczne maja podziałkę równomierną.
Watomierz cyfrowy
1) Woltomierz impulsowo-czasowy (nap. stałego):
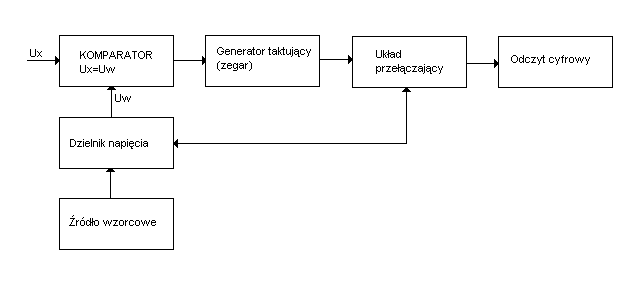
a) schemat blokowy:
Schemat ideowy woltomierza impulsowo-czasowego wygląda następująco:
Idea pomiaru polega na zamianie mierzonego nap. Ux na określony przedział czasowy Δt będący miarą tego napięcia, w którym są zliczane przez licznik przechodzący przez bramkę impulsy wzorcowe generowane przez generator impulsów wzorcowych.
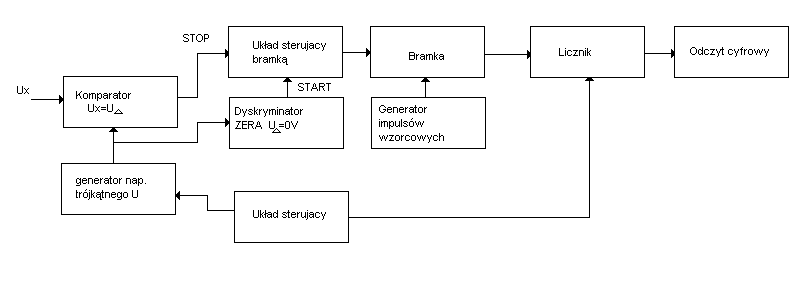
Schemat funkcjonalny (blokowy) volt. imp.-czas. wygląda następująco:
b) Przebiegi czasowe:
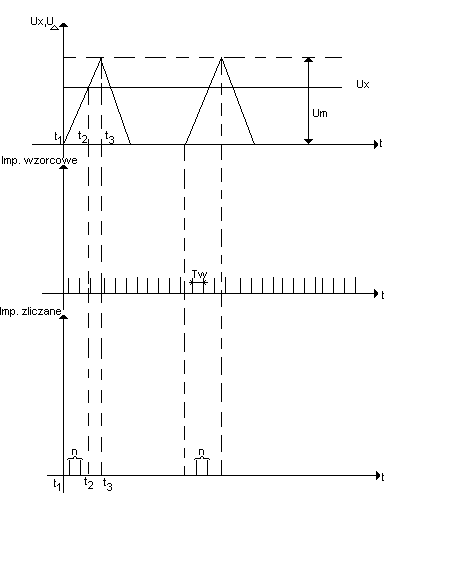
Δt = t3-t1
Δ t1=t2-t1
Ux - nap. mierzone
Um - amplituda nap.
trójkątnego UΔ
Δ t - czas narastania nap.
trójkątnego
Δ t1 - czas po którym nap. Ux
zrówna się z nap. trójkątnym UΔ
Tw - okres impulsów
wzorcowych
N - liczba zliczanych impulsów
c) Zasada działania:
Z chwilą rozpoczęcia pomiarów układ sterujący kasuje stan licznika i uruchamia impuls z generatora nap. trójkątnego. W momencie przejścia nap. trójkątnego UΔ przez 0 (UΔ =0V) co zostaje sprawdzone w dyskryminatorze 0, układ sterujący bramka wysyła impuls otwierający bramkę. Przez bramkę zaczynają przechodzić impulsy wzorcowe generowane przez generator impulsów wzorcowych, które zlicza licznik. Jeżeli nap. trójkątne UΔ zrówna się z nap. mierzonym, co zostaje stwierdzone w komparatorze, wówczas komparator wysyła sygnał do ukł. Sterującego bramką zamykający bramkę. Zatem bramka przepuszcza w czasieΔt1 n- impulsów o szerokości (okresie) Tw, które zlicza licznik. A zatem Δt1=n*Tw.
Szybkość narastanie nap. trójkątnego VΔ wyraża się wzorem Um / Δt
i jest ona stała dla danego przebiegu trójkątnego. Zatem po czasie Δt1 nap. trójkątne UΔ będzie równe:
UΔ =VΔ*Δt1 =( Um / Δt)*Tw* n = Ux
Ux=( Um / Δt)**Tw* n ; ( Um / Δt)**Tw= k =const. ; Ux=k*n
Wniosek: Nap. mierzone Ux jest proporcjonalne do liczby impulsów.
2) Woltomierz kompensacyjny:
schemat blokowy:
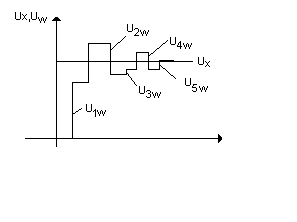
Przebiegi czasowe:
U1w = 4ΔUw
U2w = 2Uw
U3w = 0.5ΔUw
U4w = 1ΔUw
U5w = 0.5Δuw
Opis rysunku:
1ΔUw - najmniejsza wartość nap. wzorcowego.
c) Opis działania
Nap. wzorcowe są wytwarzane w ukł. Dzielnik nap. - źródło wzorcowe, którym jest b. dokładne źródło prądowe. Dzielnik nap. składa się z szeregu rezystorów wzorcowych, na których odkładają się nap. wzorcowe. Załóżmy, że najmniejsza wartość nap. wzorcowego jest równa 1ΔUw, natomiast największa wartość nap. wzorcowego jest równa 4ΔUw.
Idea kompensacji polega na tym, że komparator porównuje nap. mierzone Ux z nap. wzorcowym Uw poprzez badanie różnicy Ux-Uw, przy czym Uw jest kolejnym nap. wzorcowym pobranym do kompensacji. Jeżeli Ux-Uw>0, czyli Ux>UW to komparator wysyła impuls do układu informujący o tym, że składową nap. wzorcowego Uw należy uwzględnić w procesie kompensacji. Jeżeli Ux-Uw<0, czyli Ux<Uw to komparator wysyła impuls informujący o tym, że składowej Uw nie uwzględnia się w kompensacji i w następnym kroku kompensacji pobierane jest następne nap. wzorcowe, które jest dodawane do nap. wzorcowego ostatnio wziętego i zaakceptowanego do kompensacji.
Woltomierz całkujący
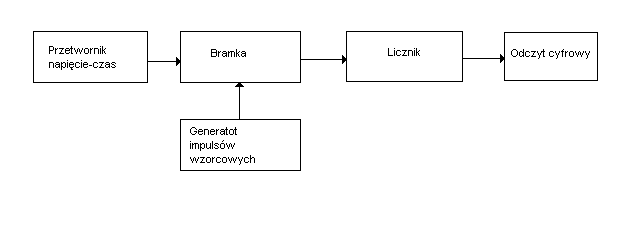
Woltomierze o przetwarzaniu napięcie-częstotliwość
Schemat blokowy
Przebiegi czasowe
Zasada działania
Napięcie mierzone Ux z zakłóceniami z sieci, czyli mające wartość chwilową Ux(t)=Ux+Um*sinωt jest podane na wejście przetwornika U/f. Przetwornik U/f zmienia mierzone napięcie na ciąg przebiegów trójkątnych charakteryzujących się zmienna prędkością narastania zależną od wartości chwilowej napięcia Ux i stałym czasie opadania, czyli na impulsy trójkątne o zmiennym okresie ΔT. Tak uformowane przebiegi są podane na wejście układu formującego, którego zadaniem jest uformowanie przebiegów prostokątnych w części opadające przebiegów trójkątnych, czyli uformowanie przebiegów prostokątnych o stałej szerokości tało. Bramka zostaje otwarta na czas trwania okresu impulsów wzorcowych Tw generowanych przez generator impulsów wzorcowych. W tym czasie Tw przez bramkę przechodzi n impulsów prostokątnych o szerokości tało zliczonych przez licznik i odczytanych w urządzeniu odczytowym.
Cyfrowy miernik pomiaru odstępu czasu
Schemat blokowy
przebiegi czasowe
zasada działania
Impulsy elektryczne ograniczające odstęp ΔT są podawane na wejścia układów formujących. Zadaniem układu formującego jest utworzenie z tych impulsów elektrycznych 2 impulsów szpilkowych zaznaczających początek i koniec mierzonego okresu czasu ΔT. Utworzony przedział ΔT staje się impulsem bramkowym i za pomocą układu sterującego bramka otwiera bramkę na czas ΔT i w tym czasie przez bramkę przechodzi n impulsów z generatora impulsów wzorcowych o okresie Tw, które zlicza licznik.
ΔT=n*Tw
Maksymalny przedział czasu ΔTmax, który może być zmierzony zależy od pojemności licznika No. Do wyznaczenia błędu pomiaru odstępu czasu zastosujemy pochodna logarytmiczną.
ΔT=n*Tw…… logΔT = log(n*Tw)……. logΔT = logn + logTw
dΔT/ ΔT = dn/n + dTw/Tw…… dΔT = Δ(ΔT) ….. dn Δn
dTw ΔTw …… ΔΔT/ΔT = Δn/n + ΔTw/Tw... Δn = plus-minus 1 impuls
ΔΔT/ΔT = plus-minus1/n + ΔTw/Tw….1/n - błąd względny metody zliczania……ΔTw/Tw - błąd względny wzorca często
ΔTw/Tw Δfw/fw
Cyfrowy pomiar małych częstotliwości.
a) Schemat blokowy:
b) Przebiegi czasowe:
c) Zasada działania:
Mierzone nap. Ux jest podawane na wejście ukł. formującego. Układ formujący generuje impulsy szpilkowe w momencie, gdy sinusoida przechodzi przez 0 i narasta. Bramka zostaje otwarta tylko na czas trwania okresu mierzonego Tx.
W tym czasie przez bramkę przechodzą impulsy wzorcowe z generatora wzorcowego o szerokości Tw, które zlicza licznik. Zatem można przyjąć, że w czasie otwarcia bramki Tx przejdzie „n” impulsów o szerokości Tw.
Tx = n*Tw
d) analiza dokładności pomiaru mierzonej częstotliwości:
Δn = ±1 impuls
1/n - względny błąd metody zliczania
Δfw / fw - względny błąd wzorca częstotliwości
Δfx / fx - względny błąd pom. częst.
- sumowanie arytmetyczne
- sumowanie geometryczne
1
Wyszukiwarka
Podobne podstrony:
sciaga3, Inżynieria środowiska, I semestr, Biologia i ekologia, materiały na egzamin z biol
diagnostyka materialy na egzamin
Materiały na egzamin PL
Poetyka material na egzamin id Nieznany
Estzad, Studia, Przetwórstwo mięsa - Semestr 1, Statystyka, materiały na egzamin
POLITYKA SPOLECZNA wyklad 8 maja, uczelnia WSEI Lublin, UCZELNIA WSEI, MATERIAŁY NA EGZAMIN 2 semest
teoretyczne podstawy wychowania, Materiały na egzaminy
KAZIRODZTWO, Materiały na egzaminy, Patologie społeczne
materiały na egzamin, Studia z psychologii, Psychologia rozwoju człowieka w cyklu życia
Materiały na egzamin, Materiały pomocnicze Technik Informatyk
Zakres wymaganego materiału na egzamin dla V roku lekarskiego
Materiał na egzamin
Materia+é.na.egzamin.ko+äcowy.WNEiZ-2.2012, Egzamin
Bezpieczeństwo publiczne - materiały na egzamin, Zarządzanie UJ
Fizjologia - materiały na egzamin2, Pielęgniarstwo, Fizjologia
materialy-na-egzamin, studia, studia, roboty ziemne
opracowanie materiału na egzamin, Pedagogika, Lekomania
Zarządzanie zasobami ludz materiały na egzamin, Zarządzanie zasobami ludzkimi
więcej podobnych podstron