Image0046 BMP
są łatwiej magncsowalii?. a indukcja magnetyczna w stanic nasyceniu irM większa dla tych ciał niż dla ciał twardych magnetycznie.
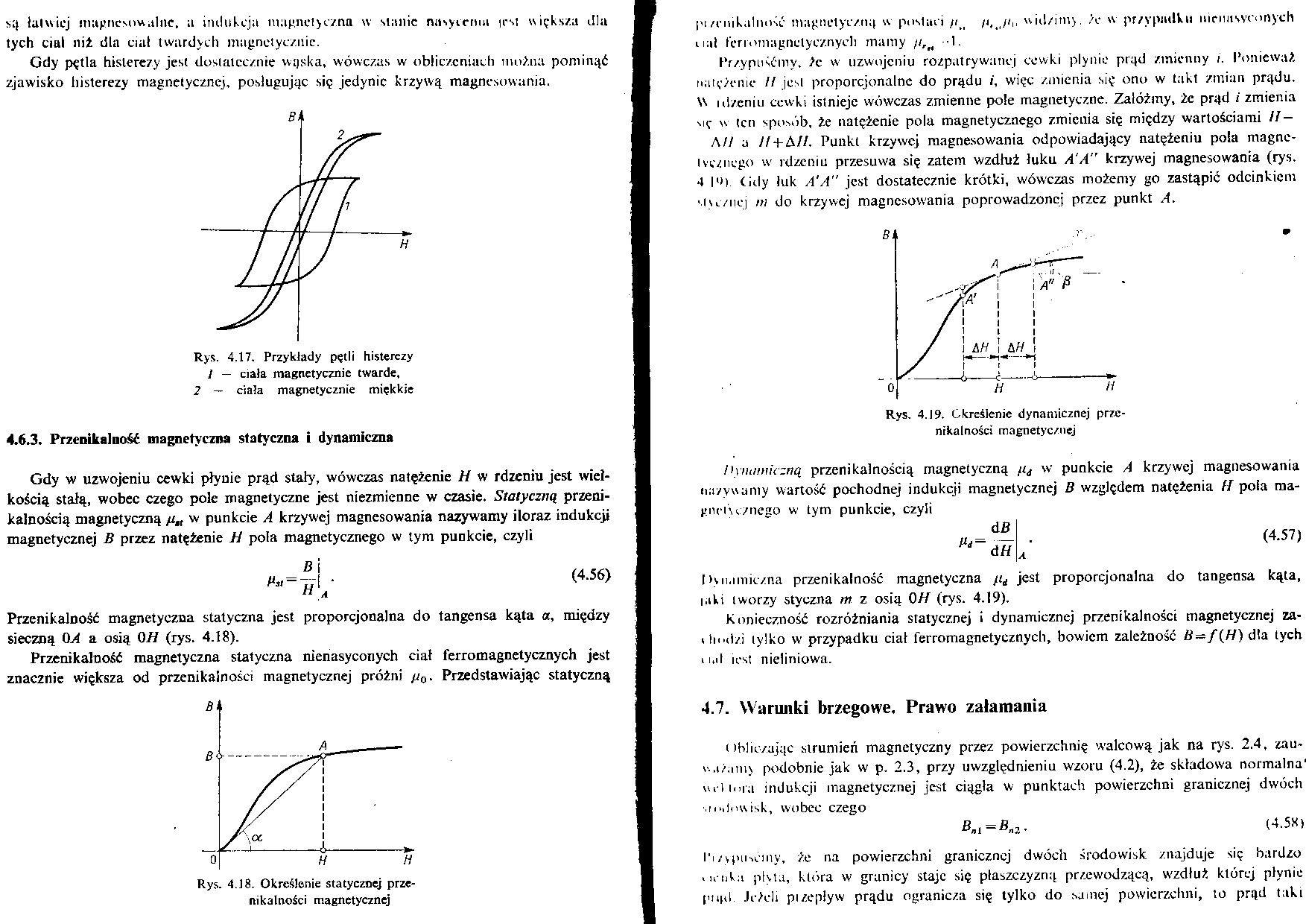
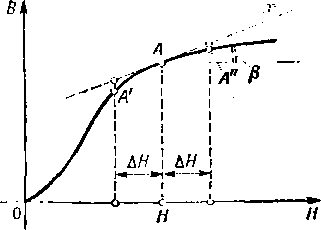
Gdy pętla hislerezy jest dostatecznie wąska, wówczas w obliczeniach można pominąć zjawisko liisterezy magnetycznej, posługując się jedynie krzywą magnesowania.
Rys. 4.17. Przykłady pętli histerezy 1 — ciała magnetycznie twarde,
2 — ciała magnetycznie miękkie
4.6.3. Przenikalność magnetyczna statyczna i dynamiczna
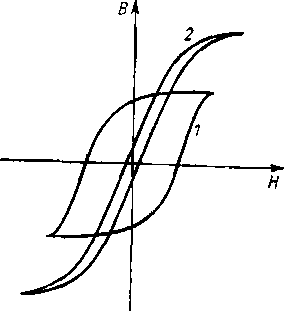
Gdy w uzwojeniu cewki płynie prąd stały, wówczas natężenie H w rdzeniu jest wielkością stałą, wobec czego pole magnetyczne jest niezmienne w czasie. Statyczną przeni-kalnością magnetyczną fi„ w punkcie A krzywej magnesowania nazywamy iloraz indukcji magnetycznej B przez natężenie H pola magnetycznego w tym punkcie, czyli
B\
(4.56)
A
Przenikalność magnetyczna statyczna jest proporcjonalna do tangensa kąta a, między sieczną 0A a osią OB (rys. 4.18).
Przenikalność magnetyczna statyczna nienasyconych ciał ferromagnetycznych jest znacznie większa od przenikainości magnetycznej próżni fj0. Przedstawiając statyczną
Rys. 4.18. Określenie statycznej prze-nikalności magnetycznej
I't /niikalnnść magnetyczną w postaci (t ji,, widzimy. że w przypadku nic nasyconych li:il ferromagnetycznych mamy /i,u -I.
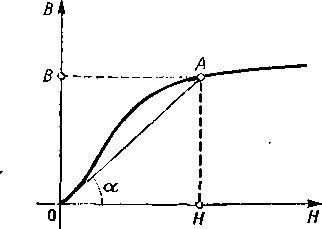
Przypuśćmy, żc w uzwojeniu rozpatrywanej cewki płynie prąd zmienny i. Ponieważ naiyżeriie // jest proporcjonalne do prąciu i, więc zmienia się ono w takt zmian prądu. W ulżeniu cewki istnieje wówczas zmienne pole magnetyczne. Załóżmy, żc prąd i zmienia mc w ten sposób, że natężenie pola magnetycznego zmienia się między wartościami H— Ali u If + Afl. Punkt krzywej magnesowania odpowiadający natężeniu pola magne-ueznego w rdzeniu przesuwa się zatem wzdłuż łuku A' A" krzywej magnesowania (rys. 4 l1M (idy łuk A'A" jest dostatecznie krótki, wówczas możemy go zastąpić odcinkiem ślicznej in do krzywej magnesowania poprowadzonej przez punkt A.
Rys. 4.19. Określenie dynamicznej przenika (ności magnetycznej
liyiiiwuczną przenikalnością magnetyczną fij w punkcie A krzywej magnesowania nazywamy wartość pochodnej indukcji magnetycznej B względem natężenia fi poła magu e licznego w tym punkcie, czyli
Pi =

(4.57)
[ >>n,imic/na przenikalność magnetyczna ftd jest proporcjonalna do tangensa kąta, iuki tworzy styczna m z osią OH (rys. 4.19).
Konieczność rozróżniania statycznej i dynamicznej przenikalności magnetycznej za-diud/i tylko w przypadku ciał ferromagnetycznych, bowiem zależność B—f (H) dla tych t uił icst nieliniowa.
4.7. Warunki brzegowe. Prawo załamania
obliczając strumień magnetyczny przez powierzchnię walcową jak na rys. 2.4, zauważamy podobnie jak w p. 2.3, przy uwzględnieniu wzoru (4.2), że składowa normalna1 wiiinra indukcji magnetycznej jest ciągła w punktach powierzchni granicznej dwóch ■.lodowisk, wobec czego
BnL=Bn2. (4.5X1
11 / > puśćmy, że na powierzchni granicznej dwóch środowisk znajduje się bardzo iH-nka płyta, która w granicy staje się płaszczyzną przewodz.ącą, wzdłuż której płynie pnul Jeżeli pizepływ prądu ogranicza się tylko do samej powierzchni, to prąd taki
Wyszukiwarka
Podobne podstrony:
Image0049 BMP i h - = ^i/0 + --j"^cosfl, 1 8Vai (At lis 2 = -er I dVfl r eo W,3=-~ «3 _ dr dla
Image0108 BMP I’r/y analizie pul elektromagnetycznych c/.yslo spotyka uę zagadnienie brzegowe dla óu
Image0091 BMP a stąd U 4ft sh kd Indukcja magnetyczna w płycie wyraża się więc wzorem kd ch fcy ~‘=Y
053 bmp 7. Badanie łączy selsynowych7.1. Wiadomości ogólne Selsyny są to mikromaszyny indukcyjne słu
Image0009 BMP zodnic /c wzorem (1,20) Oznuczu to, >c wektory grud tp oraz, dr są do siebie prosto
Image0017 BMP Równania Maiwelln wyrażają nierozerwalny /wiązek pola elektrycznego i magnetycznego, k
Image0030 BMP 2.7.2. Pojemność linii dwuprzewodowej Dwa jednakowe, bardzo długie, naładowane przewod
Image0036 BMP 4. POLE M AGNETOSTATY CZNE4.1. Równania pola magnetostatycznego Poleru magm tost a!} r
Image0037 BMP Ze względu na symetrię pula, natężenie // pola magnetycznego jest stałe w punktu di ok
Image0045 BMP 4.6. Własności magnetyczne dal4.6.1. Ciała diamagne tyczne i paramagnetyczne W punkcie
Image0050 BMP 5. OBWODY MAGNETYCZNE5.1. Uwagi ogójne Obwodem magnetycznym nazywamy obszar, w który n
Image0051 BMP Na rysunku 5.2 przedstawione są krzywe magnesowani* di* staliwa {krzywa /) oraz dla bl
Image0052 BMP przy czy ni A 1R, (5.11) nazywamy przewodnością magnetyczną lub permeancją odcinka obw
Image0056 BMP 5.6. Mu ruch trwały *e s/czrlinit Magnesy trwale otrzymuje My, niagnemiąc ciała magnet
Image0057 BMP 6. INDUKCJA ELEKTROMAGNETYCZNA6.1. Zjawisko indukcji elektromagnetycznej 6.1.1. Siła e
Image0059 BMP przy czym A 1.2,,;. Ponieważ zwoje cewki połączone są szereg*)wo, więc siła ciekli o.
Image0064 BMP Stwicul/nmy zatem, że indukcyjnióć wzajcmmi dwóch obwodów pi/edstawi.i w/ór Stwicul/nm
Image0083 BMP Zależność rezystancji i indukcyjnnśct wewnętrznej przewodu od częstotliwości prądu ilu
Image0094 BMP wiroprądowych w omawianym ukfnd/ic. Załóżmy, żc puramclry charakteryzujące oba środowi
więcej podobnych podstron