24 luty 07 (97)
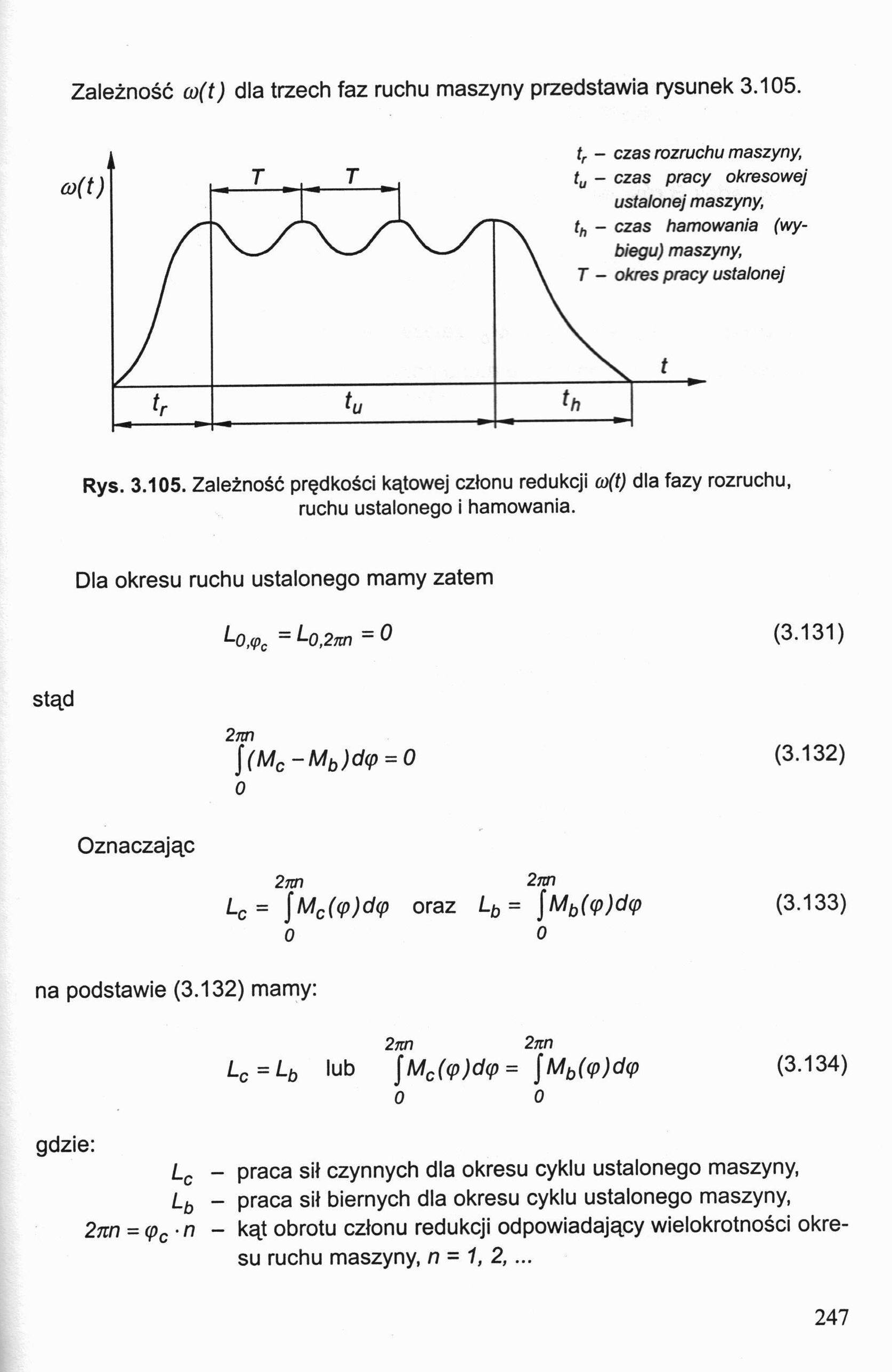
Zależność co(t) dla trzech faz ruchu maszyny przedstawia rysunek 3.105.

tr - czas rozruchu maszyny, tu - czas pracy okresowej ustalonej maszyny, th - czas hamowania (wybiegu) maszyny,
T - okres pracy ustalonej
Rys. 3.105. Zależność prędkości kątowej członu redukcji co(t) dla fazy rozruchu, ruchu ustalonego i hamowania.
Dla okresu ruchu ustalonego mamy zatem
L(),<pc - l~0,2nn ~ 0
(3.131)
stąd
2rm
j(Mc-Mb)d(p = 0 0
(3.132)
Oznaczając
2nn 2nn
Lc= l^c((P)dę oraz Lb = JMb(cp)dę o o
(3.133)
na podstawie (3.132) mamy:
Lc=Lb lub
2nn 2nn
jMc((p)d(p= \Mb(ę)d(p 0 0
(3.134)
gdzie:
Lb
2nn = ęc-n
praca sił czynnych dla okresu cyklu ustalonego maszyny, praca sił biernych dla okresu cyklu ustalonego maszyny, kąt obrotu członu redukcji odpowiadający wielokrotności okresu ruchu maszyny, n = 1, 2,...
247
Wyszukiwarka
Podobne podstrony:
24 luty 07 (112) W chwili początkowej dla t = 0 mamy: (p10 = 0, co-i =co10. W chwili zatrzymania się
24 luty 07 (98) Z zależności (3.134) wynika, że dla okresu ruchu ustalonego maszyny praca sił czynny
24 luty 07 (45) Sprawność chwilowa dla przyjętych na rysunku parametrów geometrycznych mechanizmu kr
24 luty 07 (80) Występujące we wzorach (3.96) i (3.97) wyrażenia O2 (0: f 2 (Oi zr zr(O, oraz co,
24 luty 07 (85) Przykład 3.26 Obliczyć dla mechanizmu jarzmowego przedstawionego na rysunku 3.97 sił
skanuj0017 (172) 195 Ćwiczenie 24 5. Wykreślić zależność U2 (/) dla trzech wartośc
24 luty 07 (104) Prędkość kątową a>p w ruchu ustalonym podczas przecinania znajdziemy z zależnośc
24 luty 07 (106) Rozwiązanie Rozwiązanie zadania podzielimy na sześć etapów.Etap 1 Wyznaczenie zależ
24 luty 07 (107) Wyznaczenie pozostałych zależności (P3.204) D cos = m1; (Oj = cob; vA = rjcoj; vB =
24 luty 07 (117) stąd lub ogólnie co(A(p) = co(0) + Atp ■ f(0, to(0)) U>i+1
24 luty 07 (119) Można w ten sposób badać rozruch układu napędowego przyjmując zerowe warunki począt
24 luty 07 (120) 3.7.7. Nierównomierność biegu maszyny.Dobór koła zamachowego Cechą charakterystyczn
24 luty 07 (122) Napiszemy teraz równanie ruchu maszyny w postaci energetycznej dla części cyklu zaw
24 luty 07 (125) Zasada równowartości energii kinetycznej i pracy dla części cyklu ruchu ustalonego
24 luty 07 (130) stądJkp ~ J* a> zr CO r 4k zr,i (P3.274) Ponieważ wał pośredni obraca się zwykle
24 luty 07 (133) Do obliczeń można wykorzystać programy matematyczne np. program MATLAB lub arkusz k
24 luty 07 (13) Na podstawie rysunku 3.42 odczytujemy wartości kątów: (Mr1, co-,) = 0°, (Mb2, W2) =
24 luty 07 (141) Rozwiązując równanie (P3.287) dla zadanych warunków początkowych, mamy: -
więcej podobnych podstron