418 (7)
418 Podstawy nawigacji morskiej
19.11. Rodzaje prądów pływowych i ich związki ze skokami pływu
Podobnie jak okresy pływów, prądy pływowe mogą być półdobowe. dobowe lub mieszane.
Fazy Księżyca mają znaczący wpływ na prędkości prądów pływowych. W czasie syzygii. prędkości prądów są zawsze większe od prędkości w okresie kwadratury. Kierunki prądu pływowego nie zmieniają się równomiernie w czasie.
W wielu miejscach, gdzie pływ i prąd pływowy są półdobowe, zachodzą określone, uregulowane relacje między czasem wystąpienia niskiej i wysokiej wody oraz czasem wystąpienia prądów pływowych. W rejonach, gdzie występują pływy dobowe, prądy pływowe mają inny charakter, a związki miedzy nimi nie są stałe i trudno jest prognozować czasy wystąpienia parametrów tych prądów. Nie wszędzie więc można określić związki między prędkościami prądów pływowych a skokiem pływów.
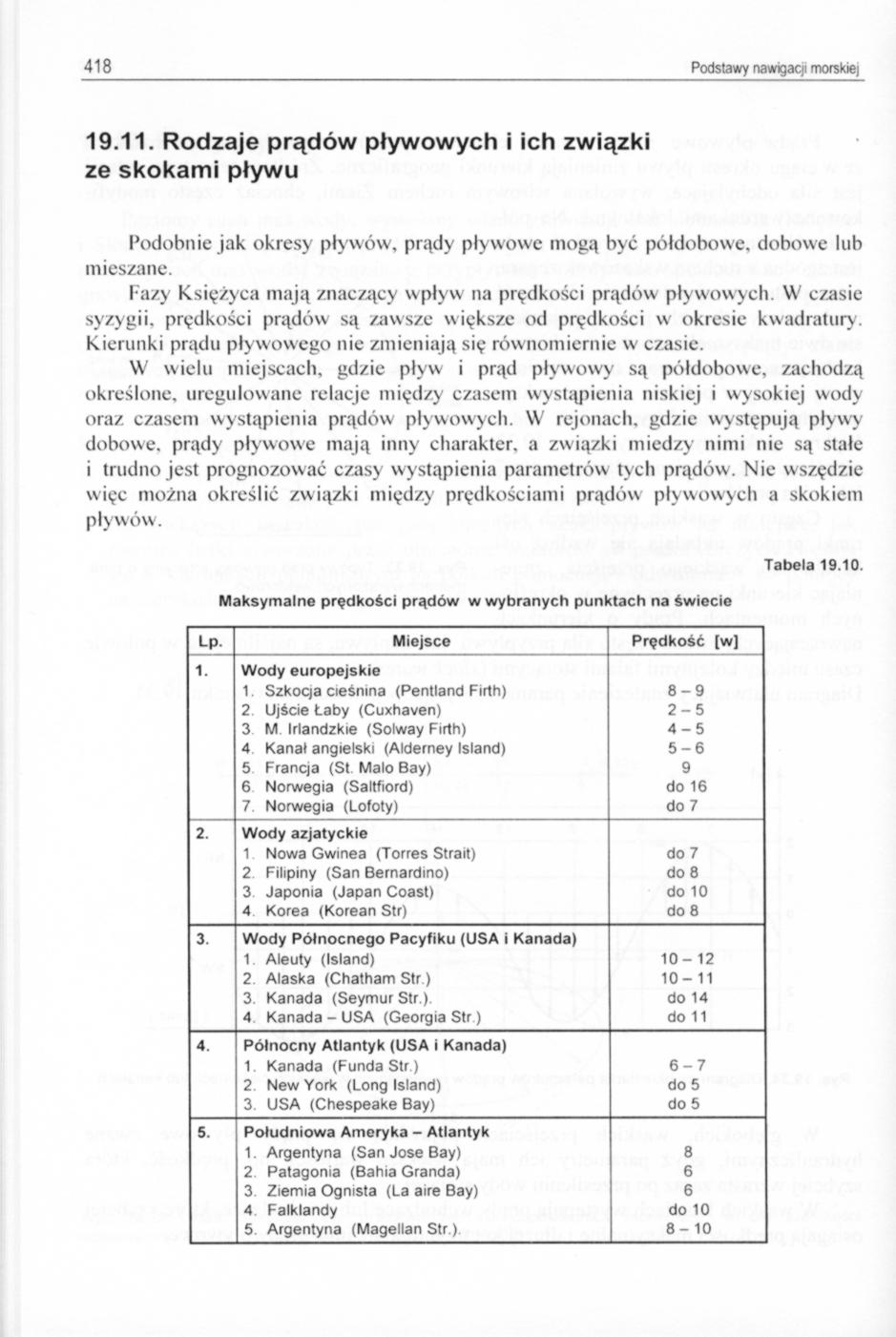
Tabela 19.10.
Maksymalne prędkości prądów w wybranych punktach na świecie
|
LP- |
Miejsce |
Prędkość [w] |
|
1. |
Wody europejskie | |
|
1. Szkocja cieśnina (Pentland Firth) |
8-9 | |
|
2 Ujście Laby (Cuxhaven) |
2-5 | |
|
3 M Irlandzkie (Solway Firth) |
4-5 | |
|
4 Kanał angielski (Alderney Island) |
5-6 | |
|
5 Francja (St. Mało Bay) |
9 | |
|
6 Norwegia (Saltfiord) |
do 16 | |
|
7 Norwegia (Lofoty) |
do 7 | |
|
2. |
Wody azjatyckie | |
|
1 Nowa Gwinea (Torres Strait) |
do 7 | |
|
2 Filipiny (San Bernardino) |
do 8 | |
|
3 Japonia (Japan Coast) |
do 10 | |
|
4 Korea (Korean Str) |
do 8 | |
|
3. |
Wody Północnego Pacyfiku (USA i Kanada) | |
|
1 Aleuty (Island) |
10-12 | |
|
2 Alaska (Chatham Str) |
10-11 | |
|
3. Kanada (Seymur Str.) |
do 14 | |
|
4 Kanada - USA (Georgia Str) |
do 11 | |
|
4. |
Północny Atlantyk (USA i Kanada) | |
|
1 Kanada (Funda Str ) |
6-7 | |
|
2 New York (Long Island) |
do 5 | |
|
3. USA (Chespeake Bay) |
do 5 | |
|
5. |
Południowa Ameryka - Atlantyk | |
|
1. Argentyna (San Jose Bay) |
8 | |
|
2 Patagonia (Bahia Granda) |
6 | |
|
3 Ziemia Ognista (La aire Bay) |
6 | |
|
4 Falklandy |
do 10 | |
|
5. Argentyna (Magellan Str.) |
8-10 |
Wyszukiwarka
Podobne podstrony:
422 (7) 422 Podstawy nawigacji morskiej19.13. Prognozy prądów według Admiralty Tide Tables (ATT) W t
398 (6) 398 Podstawry nawigaqi morskiej Określanie rodzaju pływu na podstawie stałych
310 (11) 310 Podstawy nawigacji morskiej oś nabiezmka Rys. 16.4. System nabiezmka z dwóch par staw
314 (11) 314 Podstawy nawigacji morskiej 314 Podstawy nawigacji morskiej T T» zanurzenie statyczne R
444 (8) 444 Podstawy nawigaqi morskiej20.8. Zakres informacji i rodzaje poradników dotyczących plano
342 (11) 342 Podstawy nawigacii morskiei • nurzanie i myszkowanie kadłuba, •
350 (11) 350 Podstawy nawigacji morskiej Wyidealizowany obszar niskiego ciśnienia, przesuwającego si
394 (7) 394 Podstawy nawigaqi morskie) A7 = *(l2h25m) (19.11) gdzie: k - liczba całkowita. Opóźnieni
404 (7) 404 Podstawy nawigacji morskiej c d tabeli 19 6 1 2 3 3 Indie - Birma do 11 do 7 - Bhaw
246 (18) 246 Podstawy nawigacji morskiej ___ KDd Rys. 13.11. Granice niebezpieczeństwa wyznaczone
266 (16) 266 Podstawy nawigacji morskiei Rys. 14.11. Metoda wyznaczania KDw i poprawki p° w żegludze
272 (13) 272 Podstawy nawigacji morskie]14.8. Podstawowe kierunki i wektory w nawigacji morskiej 1.
274 (15) 274 Podstawy nawigaqi morskiej Rys. 14.20. Znaki poprawek na prąd 5. Elementy żeglugi na
276 (14) 276 Podstawy nawigacji morskiej • czas przejścia t, •
282 (14) 282 Podstawy nawigacji morskiei Niżej omówione zostaną jedynie te zjawiska, które dotyczą w
284 (15) 284 Podstawy nawigaqi morskiej Faza podejścia do lądu (Landfall) W tej fazie nawigator, dla
286 (13) 286 Podstawy nawigaqi morskiej Rys. 15.7. Typowy przykład określania pozycji radarowych z k
288 (13) 288 Podstawy nawigacji morskie) Błąd wektorowy odległości wynosi: 0=0.01 -Z [m]
290 (13) 290 Podstawy nawigacji morskiej 3) w czasie ruchu należy śledzić przyjęte
więcej podobnych podstron