23 luty 07 (76)
3
6
2
~sk-1,k = sk,k-1 sk-1,k
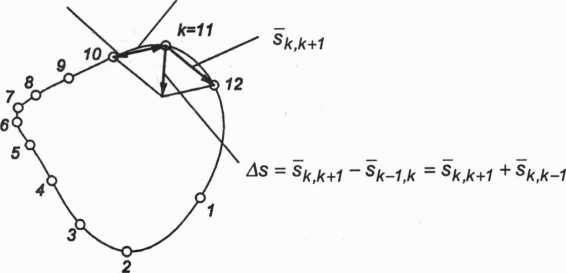
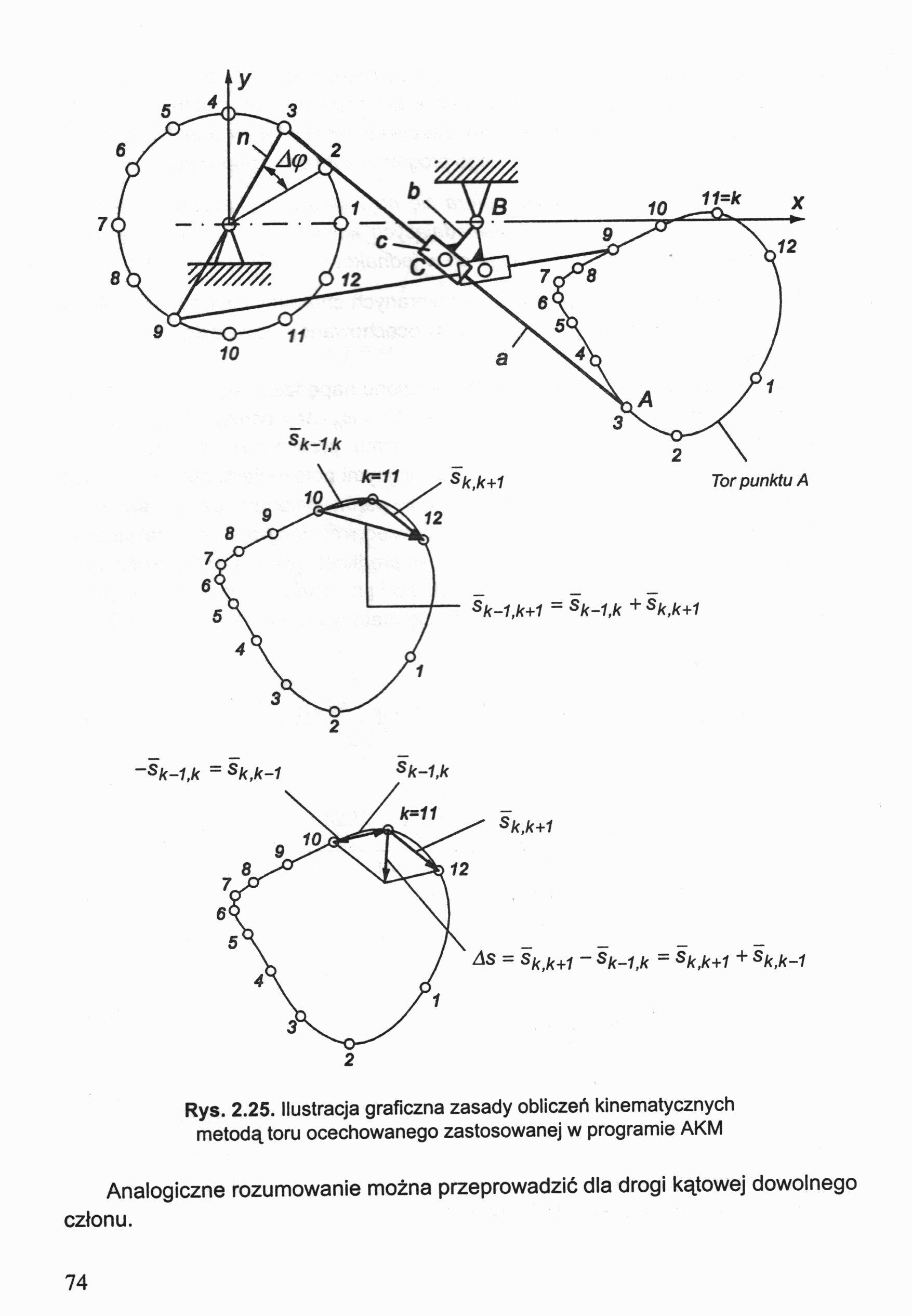
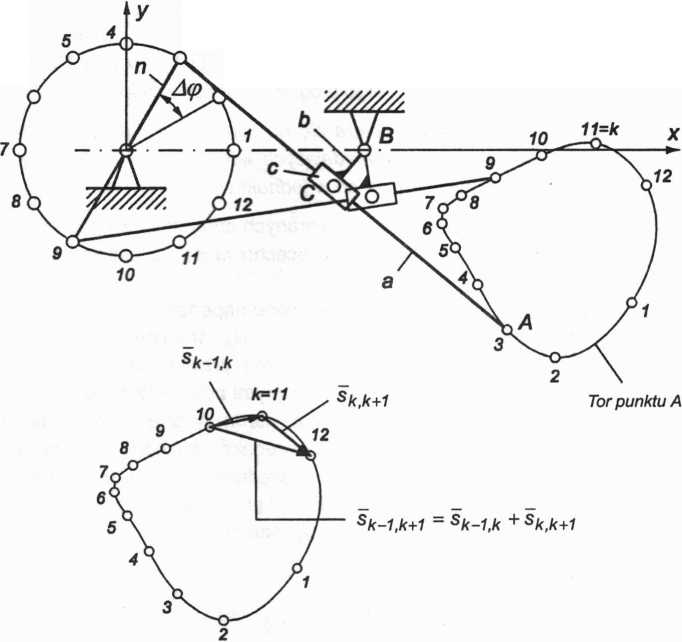
Rys. 2.25. Ilustracja graficzna zasady obliczeń kinematycznych metodą toru ocechowanego zastosowanej w programie AKM
Analogiczne rozumowanie można przeprowadzić dla drogi kątowej dowolnego członu.
74
Wyszukiwarka
Podobne podstrony:
23 luty 07 (98) ■ -.0)1 _Z2 112--- — 0)2 Z1 Rys. 2.39. Przekładnia ślimakowa z, -
23 luty 07 (75) Obecnie ma mniejsze znaczenie jako metoda graficznego rozwiązywania problemów kinema
23 luty 07 (101) Rys. 2.44. Schematy przekładni obiegowej z zaznaczonymi prędkościami kątowymi: a) b
23 luty 07 (103) Dla przekładni o dwóch stopniach swobody (przekładnia różnicowa, rys. 2.44a), w któ
23 luty 07 (104) Rys. 2.45. Przekładnia obiegowa jednorzędowa o jednym stopniu swobody: a) schemat k
23 luty 07 (112) Rys. 2.51. Schemat konstrukcyjny przekładni kształtowo-tocznej, e- mimośród - Rys.
23 luty 07 (116) a) b) P 3 Rys. 3.1. Siły zewnętrzne działające na mechanizm korbowo-suwakowy Objaśn
23 luty 07 (122) Rys. 3.5. Siły bezwładności przyłożone do członu w ruchu płaskim Siły bezwładności
23 luty 07 (123) Rys. 3.7. Przykład wyznaczania masy, położenia środka masy i momentu bezwładności c
23 luty 07 (132) Rys. 3.16. Człony czworoboku przegubowego oswobodzone od więzów Rozwiązujemy układ
23 luty 07 (142) Rys. 3.23. Analiza sił działających na grupę strukturalną (2, 3): a) układ sił zewn
23 luty 07 (149) Uwalniając suwak od więzów (rys. 3.31) naieżałobyzatem przyłożyć normalne siły reak
23 luty 07 (150) Uwalniamy teraz od więzów grupę strukturalną (2, 3) (rys. 3.32a). a) / b) 3 C *03 R
23 luty 07 (151) 1 1 R0i - O Rys. 3.33. Człon napędzający mechanizmu Oldhama oswobodzony od więzów P
23 luty 07 (17) Rys. 1.7. Para kinematyczna klasy 4 (wyższa): a) para krzywka - popychacz; b) para z
23 luty 07 (18) Rys. 1.9. Łańcuch kinematyczny zamknięty mechanizmu dźwigniowego kruszarki W celu an
23 luty 07 (19) Schemat kinematyczny w układzie płaskim V Rys. 1.10. Sporządzanie schematu kinematyc
23 luty 07 (21) Przykład 1.1 n = 3p1 = 0,p2 = 0, p3= 1, p4=1, ps=2 Rys. 1.11. Przestrzenny czworobok
23 luty 07 (23) Przykład 1.4 n = 2 p4= 1, ps = 2, iv= 1 Rys. 1.14. Mechanizm krzywkowy z popychaczem
więcej podobnych podstron