416 (7)
416
Podstawy nawigacji morskiej
19.10. Prądy pływowe
Poziomy ruch mas wody, wywołany siłami grawitacji ciał niebieskich (Księżyc i Słońce) określa się mianem prądów pływowych. Prąd pływowy jest to okresowy, poziomy ruch mas wody, związany z przypływem i odpływem, spowodowany siłami grawitacji, a raczej ich składowych poziomych na powierzchni wody. Z kolei prądy niepływowe są to prądy, które nie są wywołane pływami. Zwykle, w ogólnej cyrkulacji systemu wodnego na oceanach lub morzach, wyróżniamy prądy: stałe, okresowe, kompensacyjne oraz prądy powstałe w wyniku zmiennych warunków meteorologicznych.
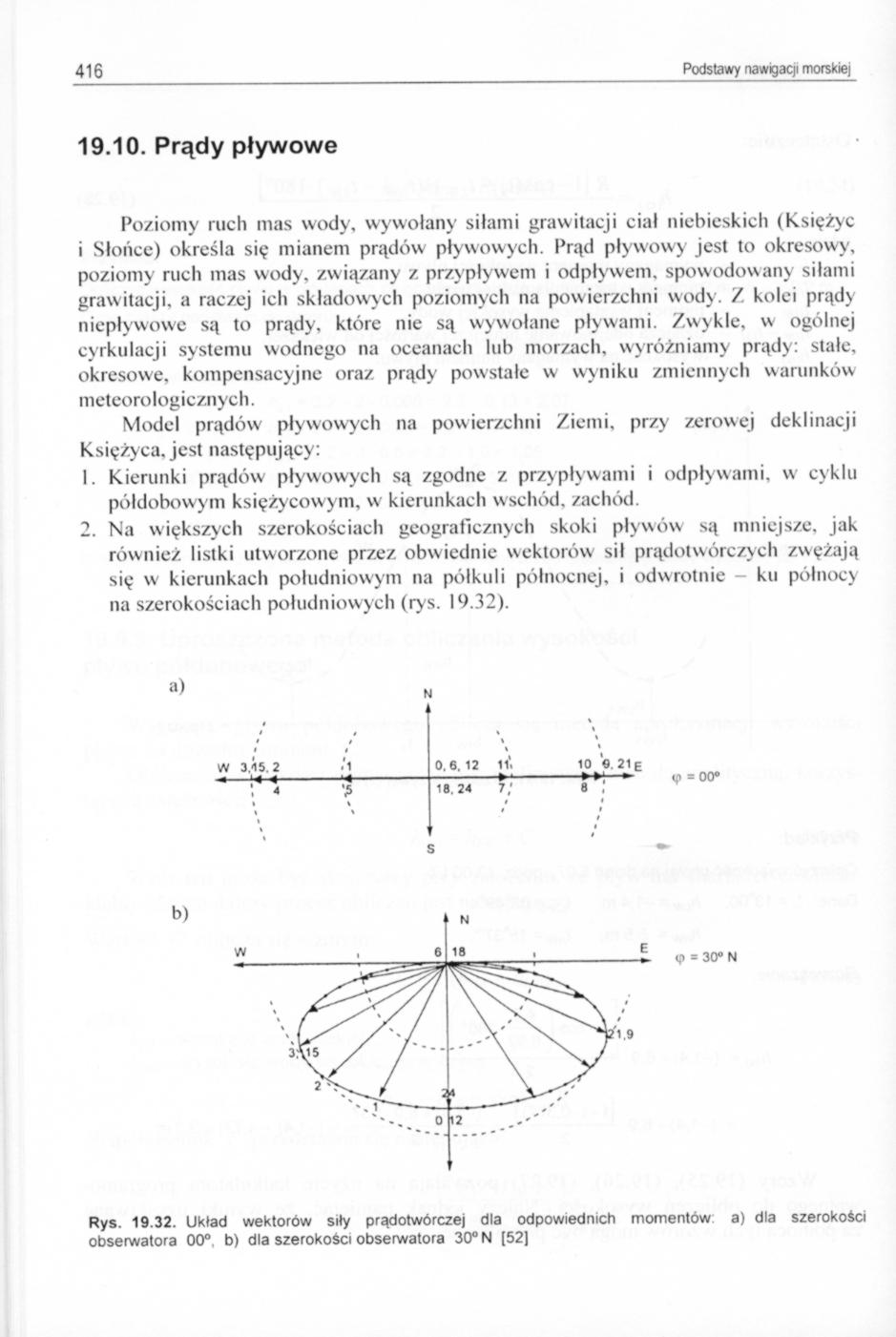
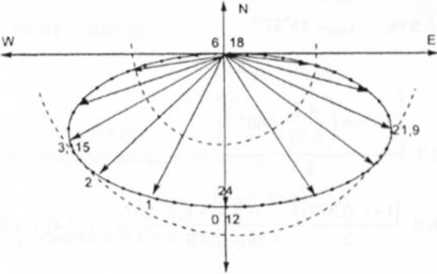
Model prądów pływowych na powierzchni Ziemi, przy zerowej deklinacji Księżyca, jest następujący:
1. Kierunki prądów pływowych są zgodne z przypływami i odpływami, w cyklu półdobowym księżycowym, w kierunkach wschód, zachód.
2. Na większych szerokościach geograficznych skoki pływów są mniejsze, jak również listki utworzone przez obwiednie wektorów sił prądotwórczych zwężają się w kierunkach południowym na półkuli północnej, i odwrotnie ku północy na szerokościach południowych (rys. I9.32).
|
1 W 3,15.2 |
i * |
0. 6. 12 |
\ \ u’. |
» % % 10 0. 21E |
<(i =00* |
|
; 4 t % |
ś % |
18. 24 |
7/ ł |
8 *: 1 1 1 |
s
<p = 30° N
Rys. 19.32. Układ wektorów siły prądotwórczej dla odpowiednich momentów a) dla szerokości obserwatora 00°. b) dla szerokości obserwatora 30° N [52]
b)
Wyszukiwarka
Podobne podstrony:
376 (10) 376 Podstawy nawigacji morskie) Zjawisko pływów ma szczególne znaczenie w żegludze morskiej
380 (10) 380 Podstawy nawigacji morskiej Podstawy dynamicznej teorii pływów W teorii dynamicznej pły
434 (10) 434 Podstawy nawigacji morskiej • wyznaczenie podstawowych metod określan
346 (10) 346 Podstawy nawigacji morskiej Informacje o stanie i prognozie pogody na obszarze od
370 (10) 370 Podstawy nawigaqi morskie] Bliższa analiza zadań od I do 5 sprecyzuje plan działania ob
406 (6) 406 Podstawy nawigacji morskiej 9° W Rys. 19.28. Amfidromiczna mapka pływów Morza Północnego
418 (7) 418 Podstawy nawigacji morskiej19.11. Rodzaje prądów pływowych i ich związki ze skokami pływ
272 (13) 272 Podstawy nawigacji morskie]14.8. Podstawowe kierunki i wektory w nawigacji morskiej 1.
274 (15) 274 Podstawy nawigaqi morskiej Rys. 14.20. Znaki poprawek na prąd 5. Elementy żeglugi na
276 (14) 276 Podstawy nawigacji morskiej • czas przejścia t, •
282 (14) 282 Podstawy nawigacji morskiei Niżej omówione zostaną jedynie te zjawiska, które dotyczą w
284 (15) 284 Podstawy nawigaqi morskiej Faza podejścia do lądu (Landfall) W tej fazie nawigator, dla
286 (13) 286 Podstawy nawigaqi morskiej Rys. 15.7. Typowy przykład określania pozycji radarowych z k
288 (13) 288 Podstawy nawigacji morskie) Błąd wektorowy odległości wynosi: 0=0.01 -Z [m]
290 (13) 290 Podstawy nawigacji morskiej 3) w czasie ruchu należy śledzić przyjęte
294 (14) 294 Podstawy nawigacji morskiej15.3. Dokładność wskazań radaru do celów nawigacyjnych Wiele
296 (13) 296 Podstawy nawigaqi morskiej Wybór czasu trwania impulsów może być dokonywany w radarach
298 (14) 298 Podstawy nawigacji morskiej Głównym parametrem wpływającym na zasięg radaru jest moc sy
300 (15) 300 Podstawy nawigaqi morskiej15.5. Zalety radaru i jego ograniczenia Urządzenia radarowe,
więcej podobnych podstron