496 (5)
13 Prądy i elektromagnetyczne momenty obrotowe maszty

496
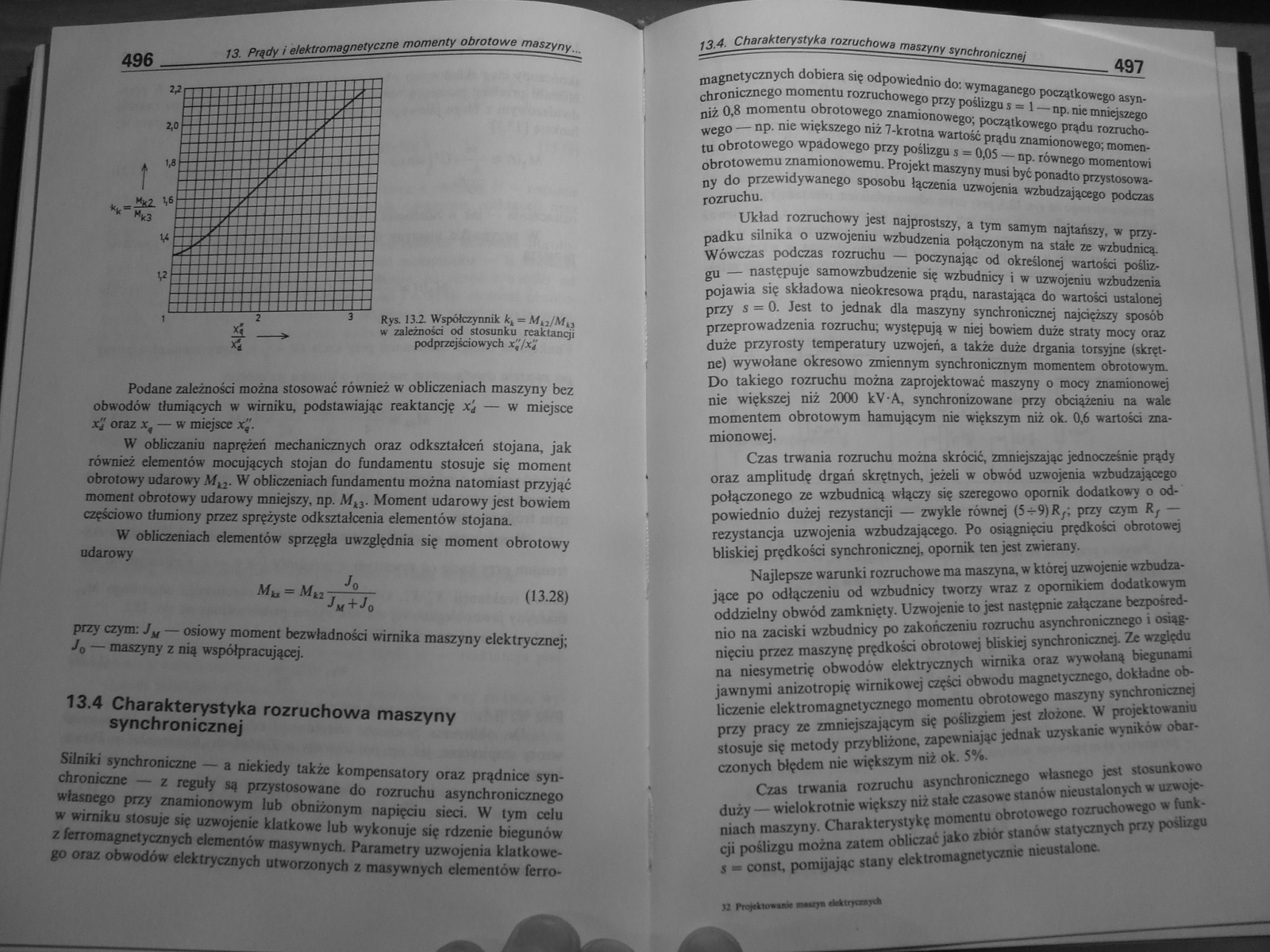
Podane zależności można stosować również w obliczeniach maszyny bez obwodów tłumiących w wirniku, podstawiając reaktancję xi — w miejsce oraz xt — w miejsce x'ę'.
W obliczaniu naprężeń mechanicznych oraz odkształceń stojana, jak również elementów mocujących stojan do fundamentu stosuje się moment obrotowy udarowy Mu. W obliczeniach fundamentu można natomiast przyjąć moment obrotowy udarowy mniejszy, np. Mky Moment udarowy jest bowiem częściowo tłumiony przez sprężyste odkształcenia elementów stojana.
W obliczeniach elementów sprzęgła uwzględnia się moment obrotowy udarowy
(13.28)
przy czym: Ju — osiowy moment bezwładności wirnika maszyny elektrycznej; J0 — maszyny z nią współpracującej.
13.4 Charakterystyka rozruchowa maszyny synchronicznej
Silniki synchroniczne — a niekiedy także kompensatory oraz prądnice synchroniczne — z reguły są przystosowane do rozruchu asynchronicznego własnego przy znamionowym lub obniżonym napięciu sieci. W tym celu w wirniku stosuje się uzwojenie klatkowe lub wykonuje się rdzenie biegunów z ferromagnetycznych elementów masywnych. Parametry uzwojenia klatkowego oraz obwodów elektrycznych utworzonych z masywnych elementów ferro-
magnetycznych dobiera się odpowiednio do: wymaganego początkowego asynchronicznego momentu rozruchowego przy poślizgu s = 1 — np. me mniejszego niż 0,8 momentu obrotowego znamionowego; początkowego prądu rozruchowego — np. nie większego niż 7-krotna wartość prądu znamionowego; momentu obrotowego wpadowego przy poślizgu s = 0,05 — np. równego momentowi obrotowemu znamionowemu. Projekt maszyny musi być ponadto przystosowany do przewidywanego sposobu łączenia uzwojenia wzbudzającego podczas rozruchu.
Układ rozruchowy jest najprostszy, a tym samym najtańszy, w przypadku silnika o uzwojeniu wzbudzenia połączonym na stałe ze wzbudnicą. Wówczas podczas rozruchu — poczynając od określonej wartości poślizgu — następuje samowzbudzenie się wzbudnicy i w uzwojeniu wzbudzenia pojawia się składowa nieokresowa prądu, narastająca do wartości ustalonej przy s = 0. Jest to jednak dla maszyny synchronicznej najcięższy sposób przeprowadzenia rozruchu; występują w niej bowiem duże straty mocy oraz duże przyrosty temperatury uzwojeń, a także duże drgania torsyjne (skrętne) wywołane okresowo zmiennym synchronicznym momentem obrotowym. Do takiego rozruchu można zaprojektować maszyny o mocy znamionowej nie większej niż 2000 kV-A, synchronizowane przy obciążeniu na wale momentem obrotowym hamującym nie większym niż ok. 0,6 wartości znamionowej.
Czas trwania rozruchu można skrócić, zmniejszając jednocześnie prądy oraz amplitudę drgań skrętnych, jeżeli w obwód uzwojenia wzbudzającego połączonego ze wzbudnicą włączy się szeregowo opornik dodatkowy o odpowiednio dużej rezystancji — zwykle równej (5+9) Rf; przy czym Rf — rezystancja uzwojenia wzbudzającego. Po osiągnięciu prędkości obrotowej bliskiej prędkości synchronicznej, opornik ten jest zwierany.
Najlepsze warunki rozruchowe ma maszyna, w której uzwojenie wzbudzające po odłączeniu od wzbudnicy tworzy wraz z opornikiem dodatkowym oddzielny obwód zamknięty. Uzwojenie to jest następnie załączane bezpośrednio na zaciski wzbudnicy po zakończeniu rozruchu asynchronicznego i osiągnięciu przez maszynę prędkości obrotową bliskiej synchronicznej. Ze względu na niesymetrię obwodów elektrycznych wirnika oraz wywołaną biegunami jawnymi anizotropię wirnikową części obwodu magnetycznego, dokładne obliczenie elektromagnetycznego momentu obrotowego maszyny synchroniczną przy pracy ze zmniejszającym się poślizgiem jest złożone. W projektowaniu stosuje się metody przybliżone, zapewniając jednak uzyskanie wyników obarczonych błędem nie większym niż ok. 5%.
Czas trwania rozruchu asynchronicznego własnego jest stosunkowo duży — wielokrotnie większy niż stałe czasowe stanów nieustalonych w uzwojeniach maszyny. Charakterystykę momentu obrotowego rozruchowego w funkcji poślizgu można zatem obliczać jako zbiór stanów statycznych przy poślizgu s ■ const, pomijając stany elektromagnetycznie nieustalone.
n t> mmąa
Wyszukiwarka
Podobne podstrony:
488 (7) 488 13 Prądy i elektromagnetyczne momenty obrotowe maszyny. U„ — napięcie znamionowe uzwojen
490 (5) 490 13. Prądy i elektromagnetyczne momenty obrotowe maszyny.ii W celu uwzględnienia wpływu s
492 (5) 492_ 13. Prądy i elektromagnetyczne momenty obrotowe maszyny mogą wystąpić podczas udarowego
494 (5) 13. Prądy i elektromagnetyczne momenty obrotowe maszyny... M,(l) przy czym: m — liczba faz;
498 (7) 498 13. Prądy i elektromagnetyczne momenty obrotowe maszyny Istnieje kilka uproszczonych met
500 (6) 13. Prądy i elektromagnetyczne momenty obrotowe maszyny (•3.38) przy czym impedancja maszyny
502 (6) 13. Prądy i elektromagnetyczne momenty obrotowe maszyny 502 po prawej stronie wzoru (13.42).
464 (8) 464 _ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej Zależność (12.5U) j
446 (11) PRĄDY I ELEKTROMAGNETYCZNY MOMENT OBROTOWY MASZYNY INDUKCYJNEJ ____12.1. Wprowadzenie
448 (9) 448 _ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej wyznacznik układu r
456 (10) 450 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjny 450
458 (10) 458. 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej Prądy w uzwojeniach
460 (8) ĄgQ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej Dokładne wartości prą
472 (8) 472 /■?- Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej Re
478 (6) 478 _ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej poślizgowi s„ przyr
482 (6) 482 _ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej Rys. 12.9. Statyczn
486 (7) 486 _ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej 486 _ 12. Prądy i e
DSCF1274 ĄjĄ 12, Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej V" X (i+a,,a
więcej podobnych podstron