5194416630
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego
Y
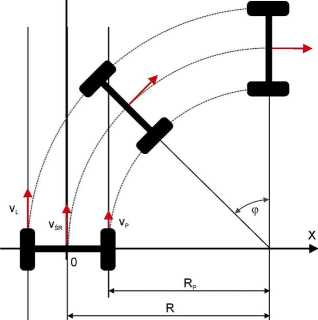
Rys. 1. Ruch pojazdu po łuku
Promień skrętu pojazdu można określić na podstawie zależności wiążącej ruch liniowy i obrotowy:
Vśr
(5)
R =
G>śr
Po uwzględnieniu (3) i (4) otrzymuje się zależność na promień skrętu pojazdu:
R ‘(P,. +<Kp)
2(ol-of)
(6)
Gdy prędkości obu kół są równe to promień skrętu dąży do nieskończoności. Oznacza to, że pojazd porusza się prostoliniowo.
Przy założeniu, że koła napędzane są bezpośrednio, tj. bez użycia przekładni, zastępcze momenty bezwładności sprowadzone na wał każdego z silników napędowych można opisać następująco:
(6)
gdzie Js jest momentem bezwładności silnika, mp jest masa pojazdu oraz J k jest momentem bezwładności koła.
2
Wyszukiwarka
Podobne podstrony:
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego Ry
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego Ry
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego Ry
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego Ry
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego Ry
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznegoObs
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego Ob
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego 9.
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego 3.
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego Ta
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego 11
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego 3.
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego ■
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego Pr
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu
Programowanie falownika SV-iCS do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego Sk
Obraz 0 2 5. Rysunek techniczny z zastosowaniem programów komputerowych Komputer przeznaczony do pra
program�1 9. Porozumiewanie się. Podręcznik do pracy z głuchoniewidomymi niemowlętami, małymi dziećm
więcej podobnych podstron