5194416632
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego
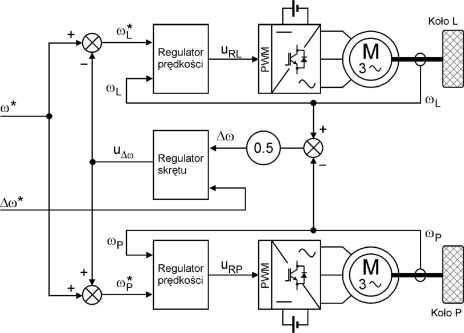
Rys. 3. Struktura sterowania pojazdu dwusilnikowego z zadawaniem prędkości z zastosowaniem regulatora skrętu
W układzie sterowania z rys. 3 uzyskuje się pełna kompensację zakłóceń. Zmiana obciążenia dowolnego z kół, która wywołuje chwilową zmianę obciążenia powoduje reakcję regulatora skrętu i odpowiednią zmianę sygnału wyjściowego Ua®.
W większości pojazdów naturalnym sposobem pracy jest zadawanie momentu napędowego a nie prędkości. Przy zadawaniu momentu prędkość pojazdu jest uzależniona od aktualnego obciążenia. Kierujący pojazdem decyduje jak zmienić zadany moment aby uzyskać pożądaną prędkość. Strukturę zamkniętego układu regulacji z zadawaniem momentu napędowego przedstawiono na rys. 4.
4
Wyszukiwarka
Podobne podstrony:
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego Ry
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego Ry
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego Y
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego Ry
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego Ry
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznegoObs
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego Ob
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego 9.
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego 3.
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego Ta
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego 11
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego 3.
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego ■
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego Pr
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu
Programowanie falownika SV-iCS do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego Sk
Obraz 0 2 5. Rysunek techniczny z zastosowaniem programów komputerowych Komputer przeznaczony do pra
program�1 9. Porozumiewanie się. Podręcznik do pracy z głuchoniewidomymi niemowlętami, małymi dziećm
więcej podobnych podstron