skrypt wzory i prawa z objasnieniami13
24
Ruch po okręgu
■ Ruch fx> okręgu jest szczególnym przypadkiem płaskiego ruchu krzywoliniowego. Niech promień okręgu wynosi r. Położenie punktu na okręgu można jednoznacznie określić podając kąt <p zakreślony przez promień wodzący Ruch ciała jest określony przez funkcję o = <p(/) Jeżeli przez s oznaczymy drogę przebytą przez ciało po okręgu w czasie, w którym droga kątowa wynosiła cp. to zachodzi związek
s = tpr.
Różniczkując obie strony tego związku względem czasu otrzymujemy
śl -
di dt
Wielkość ds/dt jest prędkością liniową v ciała w ruchu po okręgu a </<pIdi nazywamy prędkością kątową i oznaczamy symbolem ca. Zatem mamy zależność v = tor
Różniczkując obie strony tej zależności względem czasu otrzymujemy
d\ _ dlii r di dt
Wielkość d\'>dt jest przyspieszeniem stycznym ax a Jco'dt przyspieszeniem kątowym c. Mamy zatem a-, = er.
W ruchu po okręgu przyspieszenie normalne nazywamy przyspieszeniem dośrodkowym gdy ż jest skierowane do Środka okręgu Wynosi ono
Qn - ud = T ~ <0“r-
Jak widać ruch punktu materialnego poruszającego się po okręgu o promieniu r można opisać podając jego wielkości kątowe o.co.e lub wielkości liniowej, v,a$
Prędkość kątowa i przyspieszenie kątowe są wielkościami wektorowymi,
%
(0
których kierunki są równoległe do siebie i prostopadłe do płaszczyzny okręgu Zwrot wektor <i> jest wyznaczony zgodnie z regułą śruby prawoskrętnej - zwrot wektora <o pokrywa się z kierunkiem ruchu postępowego śruby prawoskrętnej, która obraca się zgodnie z
kierunkiem ruchu punktu po okręgu.
Wektor przyspieszenia kątowego e ma zwrot zgodny ze zwrotem wektora tu w przypadku przyspieszonego ruchu po okręgu fe •= —■ > 0) i przeciwny - w przypadku ruchu opóźnionego (e = ~ < 0)
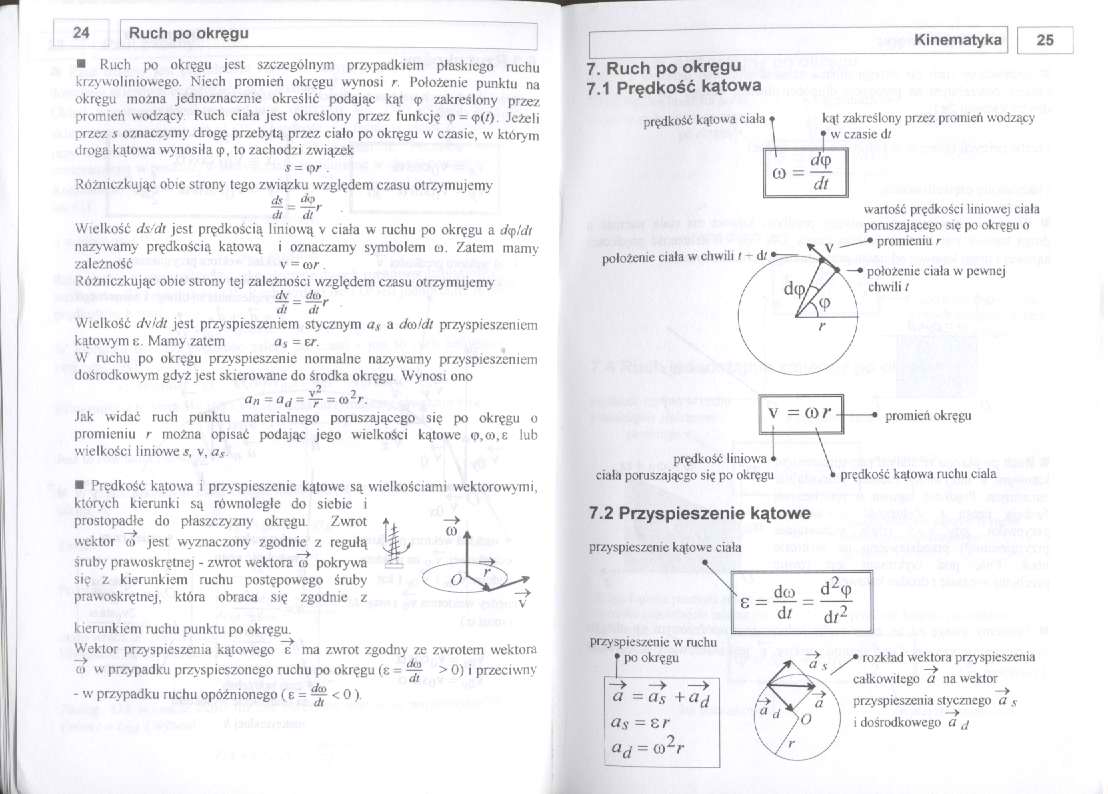
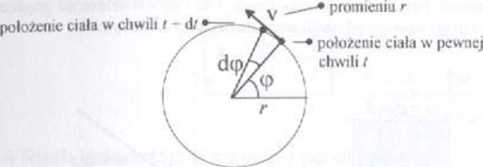
7. Ruch po okręgu 7.1 Prędkość kątowa
prędkość kątowa ciała j kąt zakreślony przez promień wodzący \ t w czasie <1/
f/ip

25
wartość prędkości liniowej ciała poruszającego ssę po okręgu o
V = co r 4-V—
prędkość liniowa A ciała poruszającgo się po okręgu
7.2 Przyspieszenie kątowe
przyspieszenie kątowe ciała
—• promień okręgu prędkość kątowa ruchu ciała
przyspieszenie w ruchu ♦ po okręgu
a =as +aj as = e r ad = co2r

i dośrodkowego a j
■* rozkład wektora przyspieszenia całkowitego a na wektor
>
a \ przyspieszenia stycznego a s
Wyszukiwarka
Podobne podstrony:
skrypt wzory i prawa z objasnieniami14 26Ruch po okręgu ■ Jednostajny ruch po okręgu można scharakte
skrypt wzory i prawa z objasnieniami23 44Pole grawitacyjne ■ Energia potencjalna w polu grawitacyjny
skrypt wzory i prawa z objasnieniami43 Siła sprężysta ■ Wzór na siłę harmoniczną powodującą drgania,
fizyka�7 1 . Mechanika 1. MECHANIKA1.2. RUCH P@ OKRĘGU Ruch po okręgu jest szczególnym przypadkiem r
skrypt wzory i prawa z objasnieniami03 4 Układy współrzędnych ■ Układem odniesienia nazywamy ciało,
skrypt wzory i prawa z objasnieniami38 74 Ruch obrotowy ciała ■ Jak wynika z własności iloczynu wekt
skrypt wzory i prawa z objasnieniami11 20 Rzut poziomy ■ Rzut poziomy w polu siły ciężkości może być
skrypt wzory i prawa z objasnieniami16 30Ruch ciała po równi ■ Siła występująca w
skrypt wzory i prawa z objasnieniami17 32 Ruch ciał ze zmienną masą ■ Równanie ( różniczkowe) mchu r
skrypt wzory i prawa z objasnieniami28 54Prawa Keplera ■ Prawa Keplera są lo prawa opisujące ruch pl
skrypt wzory i prawa z objasnieniami39 Ruch obrotowy ciała ■ Moment pędu ciała w ruchu obrotowym jes
skrypt wzory i prawa z objasnieniami57 112 Dynamika relatywistyczna ■ Pojęcie masy relatywistycznej
skrypt wzory i prawa z objasnieniami03 4 Układy współrzędnych ■ Układem odniesienia nazywamy ciało,
skrypt wzory i prawa z objasnieniami09 16Ruch prostoliniowy ■ Wzory znajdujące się w punktach 4 i 5
skrypt wzory i prawa z objasnieniami19 □ Siła Coriolisa ■ Siła Coriolisa (siła bezwładności Conohsa)
skrypt wzory i prawa z objasnieniami47 92 J 1 Małe drgania ■ Jeżeli energia potencjalna układu, któr
skrypt wzory i prawa z objasnieniami05 8 Prędkość ■ Tor jest to krzywa opisywana w przestrzeni przez
więcej podobnych podstron