DSCN0516
I
68_2. Geometria i kinematyka cwplwcntowych przekładni walcowych
Kolejny warunek nieinierferencji dotyczy obszaru wierzchołka zęba wewnętrznego i stopy zęba zewnętrznego i zapisuje się go następująco:
9w ~ Qii > Qo2- (2.55)
Jeżeli omówione warunki nieinierferencji nie są spełnione, to należy albo zmienić parametry zazębienia (najczęściej współczynniki przesunięcia zarysów zębów), albo też zmienić wysokość zębów.
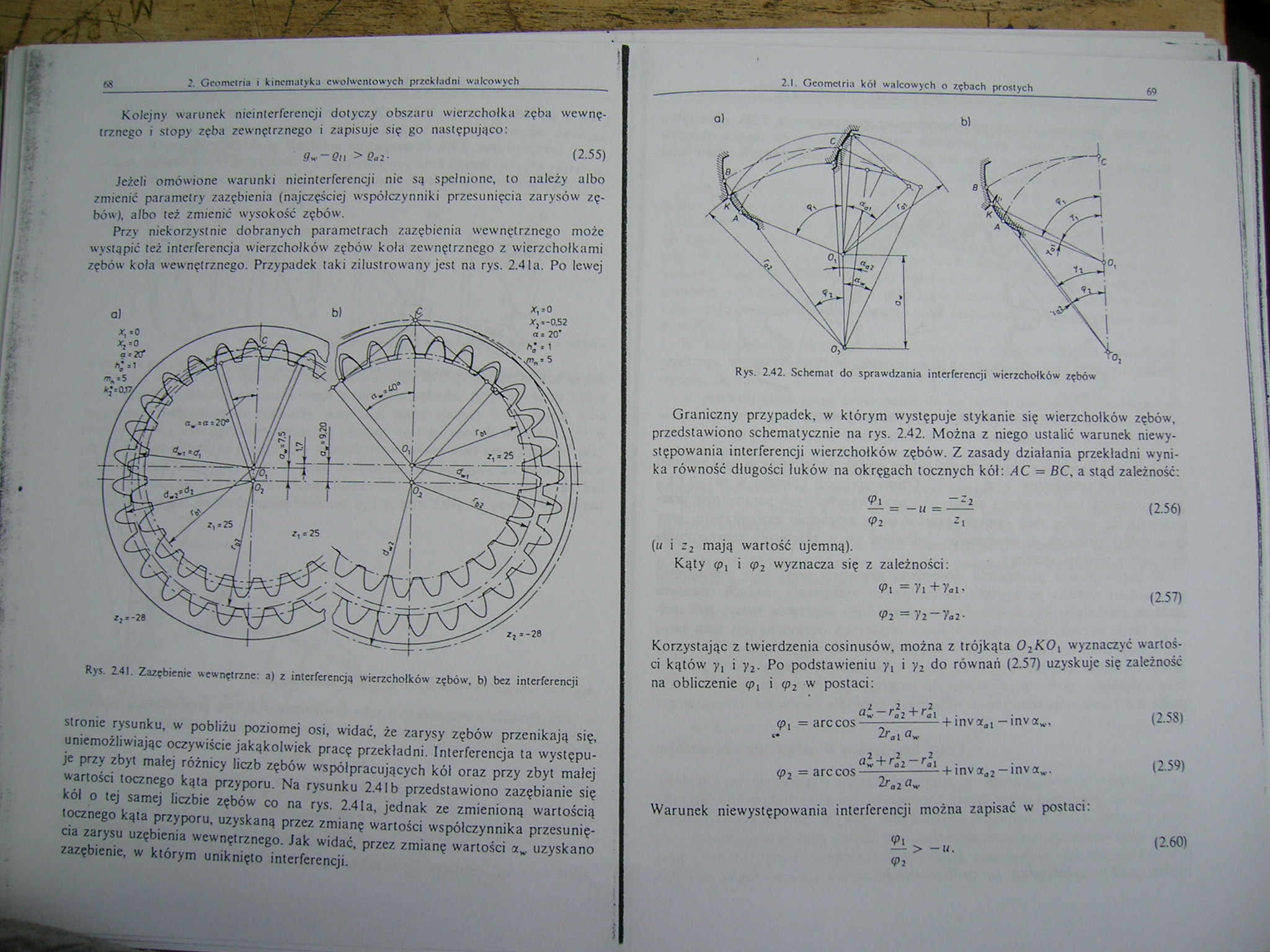
Przy niekorzystnie dobranych parametrach zazębienia wewnętrznego może wystąpić też interferencja wierzchołków zębów kola zewnętrznego z wierzchołkami zębów kola wewnętrznego. Przypadek taki zilustrowany jest na rys. 2.41a. Po lewej
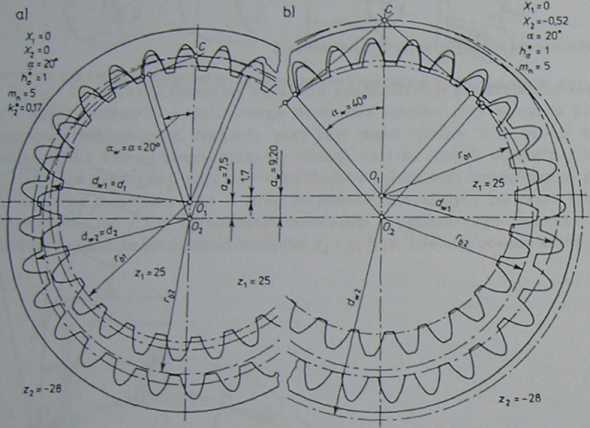
Rys. 2.41. Zazębienie wewnętrzne: a) z interferencją wierzchołków zębów, b) bez interferencji
stronie rysunku, w pobliżu poziomej osi, widać, że zarysy zębów przenikają się, uniemożliwiając oczywiście jakąkolwiek pracę przekładni. Interferencja ta występuje przy zbyt malej różnicy liczb zębów współpracujących kół oraz przy zbyt małej wartości tocznego kąta przyporu. Na rysunku 2.4Ib przedstawiono zazębianie się kół o tej samej liczbie zębów co na rys. 2.4la, jednak ze zmienioną wartością tocznego kąta przyporu, uzyskaną przez zmianę wartości współczynnika przesunięcia zarysu uzębienia wewnętrznego. Jak widać, przez zmianę wartości aK. uzyskano zazębienie, w którym uniknięto interferencji.
2.1. Geometria kół walcowych o zębach prostych
69
b)

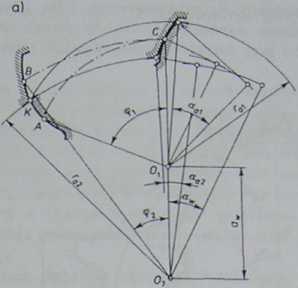
Rys. 2.42. Schemat do sprawdzania interferencji wierzchołków zębów
Graniczny przypadek, w którym występuje stykanie się wierzchołków zębów, przedstawiono schematycznie na rys. 2.42. Można z niego ustalić warunek niewystępowania interferencji wierzchołków zębów. Z zasady działania przekładni wynika równość długości łuków na okręgach tocznych kół: AC = BC, a stąd zależność:
(2.56)
(2.57)
|| _ _ -Zz
<Pi 2,
(u i z2 mają wartość ujemną).
Kąty <p, i <p2 wyznacza się z zależności:
<Pi =yi+y«t.
<Pi = y2-ya2-
Korzystając z twierdzenia cosinusów, można z trójkąta OzKO, wyznaczyć wartości kątów y, i y2. Po podstawieniu y, i y2 do równań (2.57) uzyskuje się zależność na obliczenie tp, i <p2 -w postaci:
ai—rj2 + r*, .
<Pt =arccos—---ł-invaBl — invaw.
<p2 = arccos
|rmlaw
al + rl2-rl, 2ra2aw
+ invaa2 — invaw.
(2.58)
(2.59)
Warunek niewystępowania interferencji można zapisać w postaci:
(2.60)
Ł>-..
<P 2
Wyszukiwarka
Podobne podstrony:
DSCN0504 44 2 Geometria i kinematyka cwolwcnlowych przekładni walcowych 44 2 Geometria i kinematyka
DSCN0509 I 54_2. Geometria i kinematyka cwolwcntowych przekładni walcowych Ze względu na to, że lini
DSCN0513 62_2. Geometria i kinematyka cwolwcntowych przekładni walcowych_ wzorów (rys. 2.33): c, = «
DSCN0515 66 2. Geometria i kinematyka cwolwenlowych przekładni walcowych wzajemnie położone, aby okr
DSCN0519 74 2. Geometria i kinematyka cwolwcntówych przekładni walcowych Stąd =
DSCN0522 i i 80 2 Geometria i kinematyka cwolwcntowych przekładni walcowych Rys. 153. Długości linii
DSCN0526 88 2. Geometria i kinematyka ewolwentowych przekładni walcowych Prędkość poślizgu zmienia s
DSCN0501 .w 2. Geometria i kinematyka ewolwcntowych przekładni walcowych Zarys zęba jesi symetryczny
DSCN0502 2. Geometria i kinematyka cwolwcntowych przekładni walcowych Rys. 24. Frezowanie kształtowe
DSCN0503 2. Geometria i kinematyka ewolwentowych przekładni walcowych ■sina Dla zalecanej wartości l
DSCN0508 2. Geometria i kinematyka ewolwentowych przekładni walcowych dość istotna jest w obliczenia
DSCN0510 I & i Geometria i kinematyka ewolwentowych przekładni walcowych Wynik
DSCN0514 2. Geometria i kinematyka ęwolwcniowych przekładni walcowych 64 Po wstawieniu odpowiednich
DSCN0524 85 84 2. Geometria i kinematyka cwolwcntowych przekładni walcowych 2.3. Kinematyka przekład
DSCN0525 2. (IwnKlna 8t« kincinulykii cwolwcnłowych przekładni walcowych Rys 2.58. Zmiana prędk
DSCN0520 2. Geometria i kinematyka cwoiwenipmych pfzeklaJm walw*>e>> 12.71) Uwzględniając
DSCN0527 90 .V Wytrzymałość przekładni walcowych Cala trudność polega jednak na łym, że zarówno obci
DSCN0528 V2 3 WyirłymaloiO przekładni walcowych V2 3 WyirłymaloiO przekładni walcowych F.---y--- Rys
więcej podobnych podstron