12
U) A,S. Jagiełło, Systemy elektromechaniczne dla elektryków
Wielkości W i stanowią ogólny zapis sił (wymuszeń), mających swoje źródło w innego typu energiach. Pośród nich na szczególną uwagę zasługują siły (wymuszenia) dyssypatywne. W układach elektrycznych są to spadki napięć określane relacją:
Ui=Rlqi (2.25)
gdzie Rj jest/-tą rezystancją obwodu elektrycznego.
W układach mechanicznych problem jest o tyle bardziej skomplikowany, że straty sił (momentów) mogą mieć wiele różnych przyczyn, np. tarcie „suche”, wi-skotyczne - przy ruchu laminamym, turbulentnym, czy tarcie „potoczyste”. Najczęściej dla przypadków analizy prostych układów liniowych przyjmuje się relację analogiczną do spadku napięcia na rezystancji, zatem:
Ti=Diqi (2.26)
gdzie A-jest współczynnikiem dyssypacji układu mechanicznego.
Dla tarcia „suchego” odpowiednią relację możemy zapisać w postaci:
sign(<7,.) (2.27)
gdzie:
Nj - /-ta siła nacisku prostopadła do trących powierzchni, fi,- - /-ty współczynnik tarcia „suchego”.
Szczególnym rodzajem strat wywołanych tarciem jest tarcie związane z toczeniem się koła po płaskiej powierzchni, niekiedy nazywane tarciem potoczystym. W naszych rozważaniach zajmiemy się tarciem toczącego się koła stalowego po stalowej szynie. Jest to problem najczęściej analizowany w trakcji elektrycznej. Powszechnie wiadomo, że podczas toczenia się koła po szynie, w warunkach pokonywania oporów ruchu, droga wynikająca z obwodu koła jest większa od drogi rzeczywiście przebytej przez to koło. Zjawisko to nosi nazwę poślizgu i wyrażamy je wzorem:
Qr-V
s =-
Qr
gdzie D. jest prędkością kątową koła, r jego promieniem, natomiast V prędkością liniową osi jego obrotu. Siła styczna działająca na styku koło-szyna określana jest wzorem [6].
F =
20if sbs
I 2 2
71 ^+J2
-l- a tan;
(2.28)
gdzie
b 2Cna2b
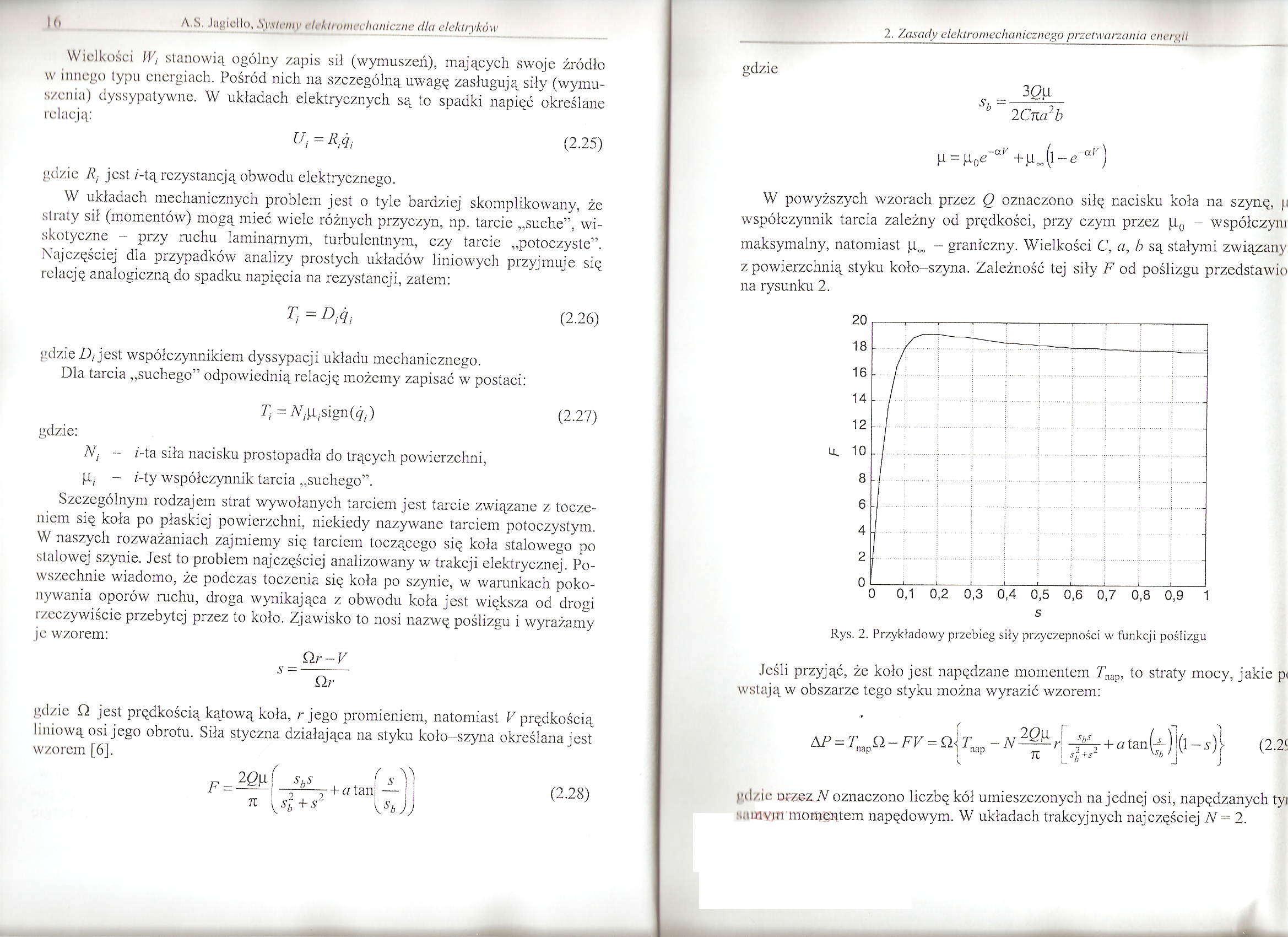
W powyższych wzorach przez Q oznaczono siłę nacisku koła na szynę, fi współczynnik tarcia zależny od prędkości, przy czym przez p,0 - współczyni maksymalny, natomiast ,11^ - graniczny. Wielkości C, a, b są stałymi związany z powierzchnią styku koło-szyna. Zależność tej siły F od poślizgu przedstawić na rysunku 2.
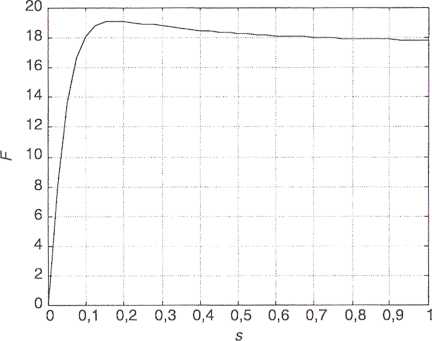
Rys. 2. Przykładowy przebieg siły przyczepności w funkcji poślizgu
Jeśli przyjąć, że koło jest napędzane momentem Tnap, to straty mocy, jakie pi wstają w obszarze tego styku można wyrazić wzorem:
AP = T^a - FV = nh - N^+a tany i(l - 5)} (2.2<
V. C b J j
gdzie orzez W oznaczono liczbę kół umieszczonych na jednej osi, napędzanych tyi siiinvm morpgntem napędowym. W układach trakcyjnych najczęściej N= 2.
Wyszukiwarka
Podobne podstrony:
126 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Współczynnik przenoszenia p dla
42 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków stąd dla zerowych warunków początkowych
48 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Teraz wyrażenie (6.5) wynikające z drugi
34 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków przy warunkach brzegowych: ©0,0) = 0
A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Relacja (2.2) pozwala napisać wyrażenie na
IX A S Jagiełło, Systemy elektromechaniczne dla elektryków Przebieg strat na styku koło-szyna przeds
22 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Dla wyznaczenia macierzy sztywności
24 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków 24 A.S. Jagiełło, Systemy elektromechani
A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Ostatecznie więc pulsacja własna maszyny
28 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków dla obydwu zmiennych stają się niezależn
30 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Rys. 7. Charakterystyka rezonansowa siln
38 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Zauważmy, że: ( eya + e~- a Y l 2 J cos3
40 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków stąd 71(2/2-1) 4 r (5.13) Aby sprawdzić,
52 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków L<t 0 VF«,1. , * .
58 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków VI
66 A.S. Jagiełło, Systemy elektromechaniczne dla elektrykówNa rysunku 18, w kolejności od dołu, zazn
70 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków 70 A.S. Jagiełło, Systemy elektromechani
więcej podobnych podstron