13
IX A S Jagiełło, Systemy elektromechaniczne dla elektryków
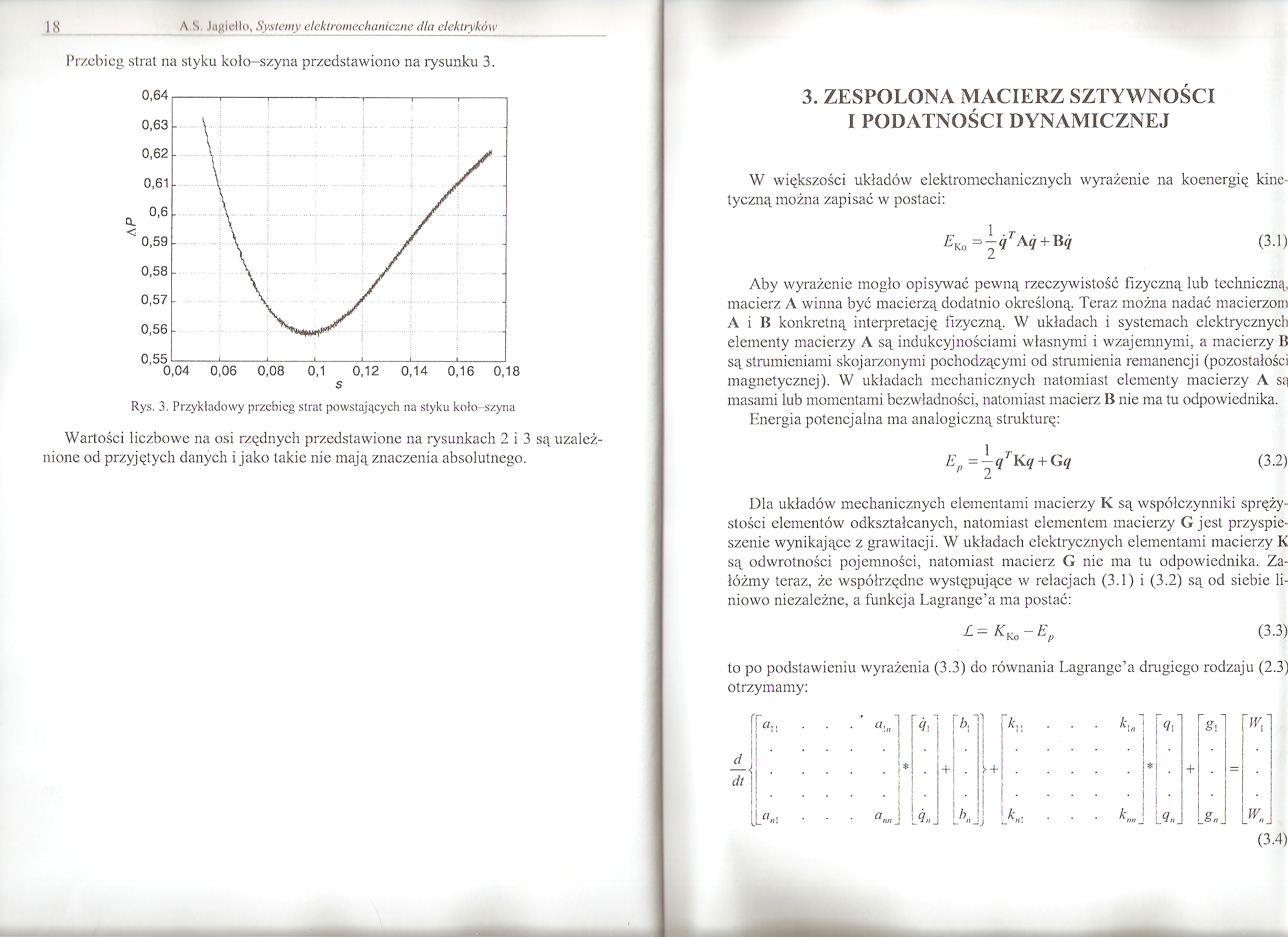
Przebieg strat na styku koło-szyna przedstawiono na rysunku 3.
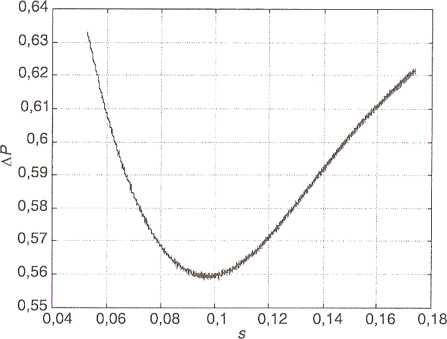
Rys. 3. Przykładowy przebieg strat powstających na styku koło-szyna
Wartości liczbowe na osi rzędnych przedstawione na rysunkach 2 i 3 są uzależnione od przyjętych danych i jako takie nie mają znaczenia absolutnego.
3. ZESPOLONA MACIERZ SZTYWNOŚCI I PODATNOŚCI DYNAMICZNEJ
W większości układów elektromechanicznych wyrażenie na koenergię kinetyczną można zapisać w postaci:
EKoĄqTKq + Hq (3.1)
Aby wyrażenie mogło opisywać pewną rzeczywistość fizyczną lub techniczną, macierz A winna być macierzą dodatnio określoną. Teraz można nadać macierzom A i B konkretną interpretację fizyczną. W układach i systemach elektrycznych elementy macierzy A są indukcyjnościami własnymi i wzajemnymi, a macierzy B są strumieniami skojarzonymi pochodzącymi od strumienia remanencji (pozostałości magnetycznej). W układach mechanicznych natomiast elementy macierzy A są masami lub momentami bezwładności, natomiast macierz B nie ma tu odpowiednika.
Energia potencjalna ma analogiczną strukturę:
£„=t?rK? + G q(3.2)
Dla układów mechanicznych elementami macierzy K są współczynniki sprężystości elementów odkształcanych, natomiast elementem macierzy G jest przyspieszenie wynikające z grawitacji. W układach elektrycznych elementami macierzy K są odwrotności pojemności, natomiast macierz G nie ma tu odpowiednika. Załóżmy teraz, żc współrzędne występujące w relacjach (3.1) i (3.2) są od siebie liniowo niezależne, a funkcja Lagrange’a ma postać:
L=KKo-E„ (3.3)
to po podstawieniu wyrażenia (3.3) do równania Lagrange’a drugiego rodzaju (2.3) otrzymamy:
In
di
i b
" Jj
|
i j |
\<łl |
V |
\K | ||
|
i * ! ! |
-i- |
' | |||
|
\ <łn |
Sn i |
kl |
(3.4)
Wyszukiwarka
Podobne podstrony:
126 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Współczynnik przenoszenia p dla
42 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków stąd dla zerowych warunków początkowych
48 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Teraz wyrażenie (6.5) wynikające z drugi
34 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków przy warunkach brzegowych: ©0,0) = 0
A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Relacja (2.2) pozwala napisać wyrażenie na
U) A,S. Jagiełło, Systemy elektromechaniczne dla elektryków Wielkości W i stanowią ogólny zapis sił
22 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Dla wyznaczenia macierzy sztywności
24 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków 24 A.S. Jagiełło, Systemy elektromechani
A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Ostatecznie więc pulsacja własna maszyny
28 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków dla obydwu zmiennych stają się niezależn
30 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Rys. 7. Charakterystyka rezonansowa siln
38 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Zauważmy, że: ( eya + e~- a Y l 2 J cos3
40 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków stąd 71(2/2-1) 4 r (5.13) Aby sprawdzić,
52 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków L<t 0 VF«,1. , * .
58 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków VI
66 A.S. Jagiełło, Systemy elektromechaniczne dla elektrykówNa rysunku 18, w kolejności od dołu, zazn
70 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków 70 A.S. Jagiełło, Systemy elektromechani
więcej podobnych podstron