17
A.S. Jagiełło, Systemy elektromechaniczne dla elektryków
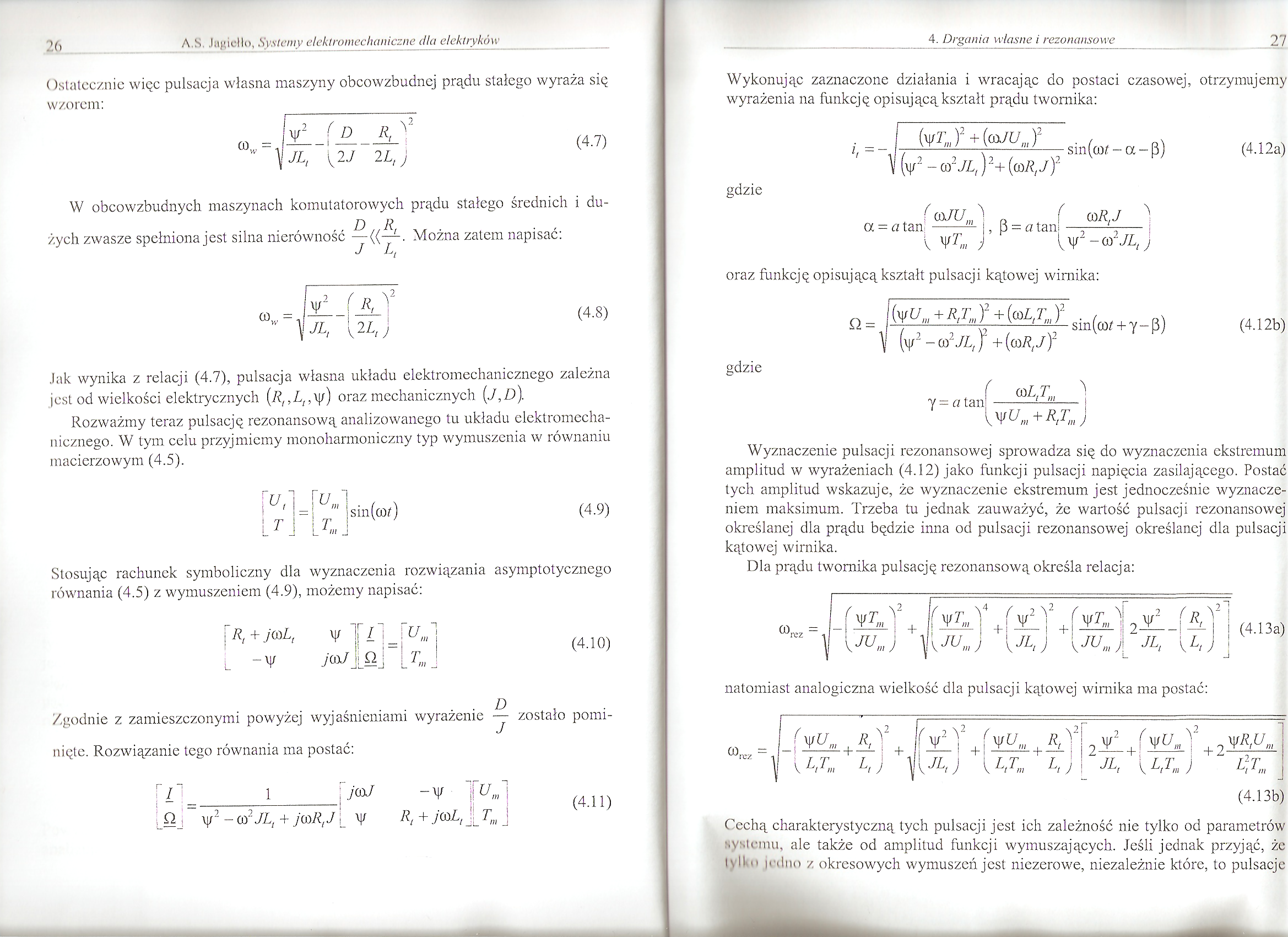
Ostatecznie więc pulsacja własna maszyny obcowzbudnej prądu stałego wyraża się wzorem:

f d r( y
\2J 2Lt)
(4.7)
W obcowzbudnych maszynach komutatorowych prądu stałego średnich i dużych zwasze spełniona jest silna nierówność —((-7-. ^°żna zatem napisać:
J Lt
«_= i-Ł-
\JL,
(4.8)
Jak wynika z relacji (4.7), pulsacja własna układu elektromechanicznego zależna jest od wielkości elektrycznych oraz mechanicznych (J,D).
Rozważmy teraz pulsację rezonansową analizowanego tu układu elektromechanicznego. W tym celu przyjmiemy monoharmoniczny typ wymuszenia w równaniu macierzowym (4.5).
|
[U ] ^ m i ! | |
|
[T J |
sin(coć)
(4.9)
Stosując rachunek symboliczny dla wyznaczenia rozwiązania asymptotycznego równania (4.5) z wymuszeniem (4.9), możemy napisać:
(4.10)
\Rt+jO)Lt \|/ TZl p7*.]
Zgodnie z zamieszczonymi powyżej wyjaśnieniami wyrażenie — zostało pominięte. Rozwiązanie tego równania ma postać:
(4.11)
j~ L\_1_-¥ 1X1
LOj \|/2 - co2 JLt f j(0RtJ L \|/ R(+ ju>L, JL Tm J
Wykonując zaznaczone działania i wracając do postaci czasowej, otrzymujemy wyrażenia na funkcją opisującą kształt prądu twomika:
sin(octf - a - p)
(4.12a)
gdzie
. (ioJUm)„ f co \
a = a tani-— i, P = a tani —-—-i
r i - -2 -2 TT !
t ‘ vV“-0)Vi,j
oraz funkcję opisującą kształt pulsacji kątowej wirnika:
(4.12b)
a (S^ESSsm(„łT-8)
y (\j/“ -<słJLt j +(co7?,Jr)2
gdzie
Wyznaczenie pulsacji rezonansowej sprowadza się do wyznaczenia ekstremum amplitud w wyrażeniach (4.12) jako funkcji pulsacji napięcia zasilającego. Postać tych amplitud wskazuje, że wyznaczenie ekstremum jest jednocześnie wyznaczeniem maksimum. Trzeba tu jednak zauważyć, że wartość pulsacji rezonansowej określanej dla prądu będzie inna od pulsacji rezonansowej określanej dla pulsacji kątowej wirnika.
Dla prądu twomika pulsację rezonansową określa relacja:
=
V
natomiast analogiczna wielkość dla pulsacji kątowej wirnika ma postać:
V W.
+ 2
{JLJ {LtTm Ljl JLt {L,Tj h)Tn
(4.13b)
Cechą charakterystyczną tych pulsacji jest ich zależność nie tylko od parametrów sy.icmu, ale także od amplitud funkcji wymuszających. Jeśli jednak przyjąć, że jedno z okresowych wymuszeń jest niezerowe, niezależnie które, to pulsację
Wyszukiwarka
Podobne podstrony:
() AS. Jagiełło, Systemy, lektromechaniczne dla elektryków Ostatecznie wiqc
126 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Współczynnik przenoszenia p dla
42 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków stąd dla zerowych warunków początkowych
48 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Teraz wyrażenie (6.5) wynikające z drugi
34 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków przy warunkach brzegowych: ©0,0) = 0
A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Relacja (2.2) pozwala napisać wyrażenie na
U) A,S. Jagiełło, Systemy elektromechaniczne dla elektryków Wielkości W i stanowią ogólny zapis sił
IX A S Jagiełło, Systemy elektromechaniczne dla elektryków Przebieg strat na styku koło-szyna przeds
22 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Dla wyznaczenia macierzy sztywności
24 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków 24 A.S. Jagiełło, Systemy elektromechani
28 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków dla obydwu zmiennych stają się niezależn
30 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Rys. 7. Charakterystyka rezonansowa siln
38 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Zauważmy, że: ( eya + e~- a Y l 2 J cos3
40 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków stąd 71(2/2-1) 4 r (5.13) Aby sprawdzić,
52 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków L<t 0 VF«,1. , * .
58 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków VI
66 A.S. Jagiełło, Systemy elektromechaniczne dla elektrykówNa rysunku 18, w kolejności od dołu, zazn
więcej podobnych podstron