30
52 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków
|
L<t |
0 |
VF«,1. |
, |
* . \ |
r° |
~Ld |
0 IM 1— | |
|
0 |
Ld |
0 —: dt \ |
k |
+M1 |
\b |
0 |
SM-tr 1 | |
|
W# |
0 |
b j |
kl |
L0 |
0 |
0 Jb/J |
|
\Rs |
0 |
o T^l |
O 1___ |
|
! o |
X, |
ii V2" o |
! o |
|
L° |
0 |
Rr}Jf\ |
W |
|
d\}w i ’^T=P< |
+ T» |
(7.1 b) |
|
S? |l5^’ ii i ^3 |
£MdfIfIq+Ts |
(7.1 c) |
Wielkości Tw i Ts są momentami działającymi po obu stronach sprzęgła.
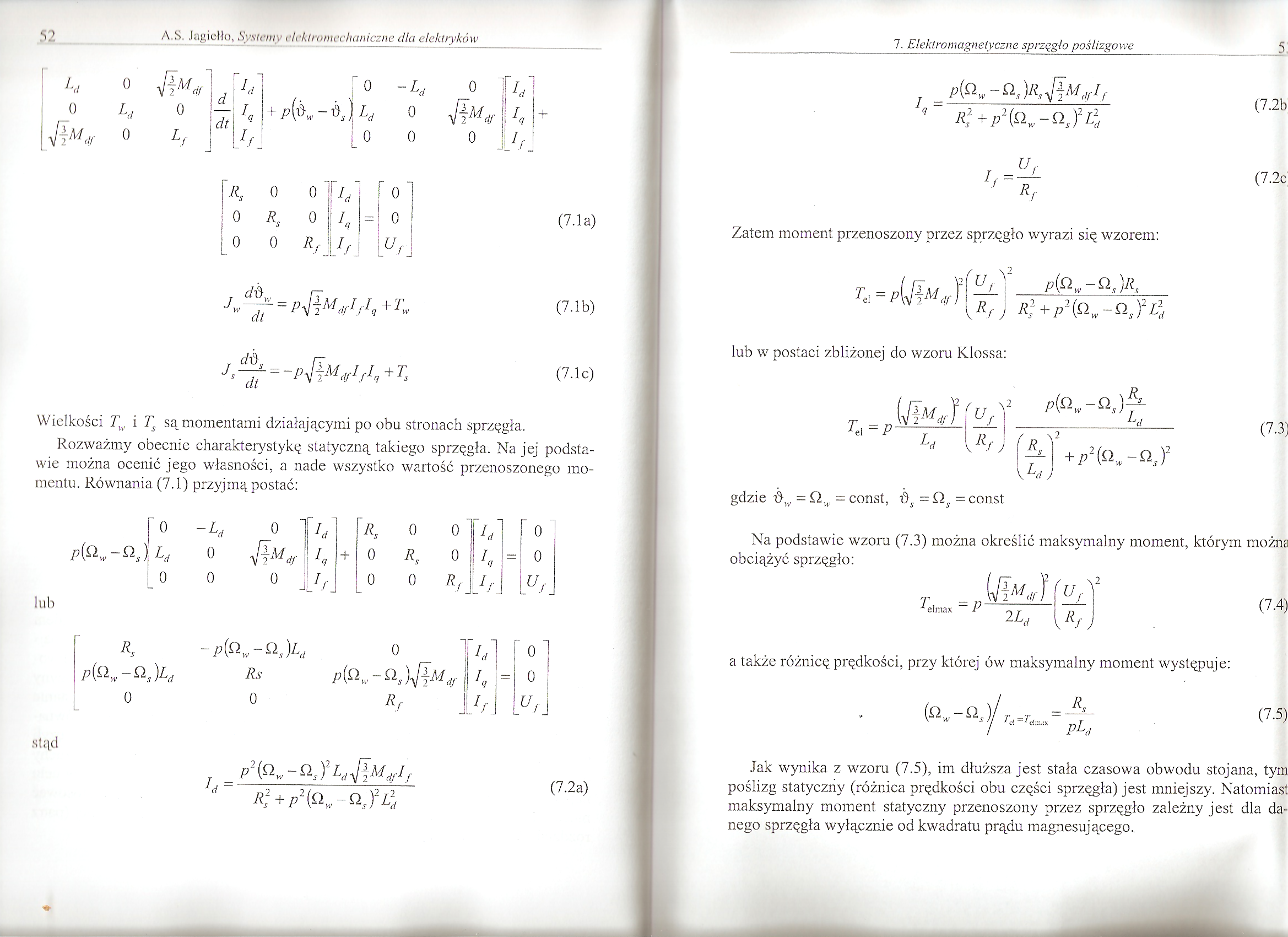
Rozważmy obecnie charakterystykę statyczną takiego sprzęgła. Na jej podstawie można ocenić jego własności, a nade wszystko wartość przenoszonego momentu. Równania (7.1) przyjmą postać:
|
r o |
~Ld |
0 |
V |
1 |
i o o |
IV |
roi | |
|
P{aw-Qs)Ld |
0 |
k |
+ |
0 Rs 0 |
lq |
- |
0 | |
|
L° |
0 |
0 |
kJ |
l |
1 O o |
ib. |
k/J | |
|
-p(nw-nX |
0 |
v |
f |
Ol | ||||
|
P{aw-Qs)Ld |
Rs |
p{Qw-Qs)^Mdf |
b |
= |
0 | |||
|
0 |
0 |
Rf |
M |
' |
Uf\ | |||
(7.2a)
4=^
(7.2c
(7.2b
4
Zatem moment przenoszony przez sprzęgło wyrazi się wzorem:
T = P{riM yKT
iel P\S2Mdf \ n „2 . 2(n n V r2
\Rf J Rs +P l&W~Qs) Ld
lub w postaci zbliżonej do wzoru Klossa:
2 P(nw-a,Y
Tel=P
(7.3)
Na podstawie wzoru (7.3) można określić maksymalny moment, którym można obciążyć sprzęgło:

a także różnicę prędkości, przy której ów maksymalny moment występuje:
(7.5)
Jak wynika z wzoru (7.5), im dłuższa jest stała czasowa obwodu stojana, tym poślizg statyczny (różnica prędkości obu części sprzęgła) jest mniejszy. Natomiast maksymalny moment statyczny przenoszony przez sprzęgło zależny jest dla danego sprzęgła wyłącznie od kwadratu prądu magnesującego..
Wyszukiwarka
Podobne podstrony:
126 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Współczynnik przenoszenia p dla
42 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków stąd dla zerowych warunków początkowych
48 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Teraz wyrażenie (6.5) wynikające z drugi
34 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków przy warunkach brzegowych: ©0,0) = 0
A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Relacja (2.2) pozwala napisać wyrażenie na
U) A,S. Jagiełło, Systemy elektromechaniczne dla elektryków Wielkości W i stanowią ogólny zapis sił
IX A S Jagiełło, Systemy elektromechaniczne dla elektryków Przebieg strat na styku koło-szyna przeds
22 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Dla wyznaczenia macierzy sztywności
24 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków 24 A.S. Jagiełło, Systemy elektromechani
A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Ostatecznie więc pulsacja własna maszyny
28 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków dla obydwu zmiennych stają się niezależn
30 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Rys. 7. Charakterystyka rezonansowa siln
38 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Zauważmy, że: ( eya + e~- a Y l 2 J cos3
40 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków stąd 71(2/2-1) 4 r (5.13) Aby sprawdzić,
58 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków VI
66 A.S. Jagiełło, Systemy elektromechaniczne dla elektrykówNa rysunku 18, w kolejności od dołu, zazn
70 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków 70 A.S. Jagiełło, Systemy elektromechani
więcej podobnych podstron