25
42 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków
stąd dla zerowych warunków początkowych rozwiązanie będzie miało postać:
A« = -^-sin(c«) co"7z
Z warunków zadania wynika, że Q(t,L) = $z(t), zatem:
(
(OTk
tgj oo. —L Jsin(<a0 = -
co V
-sin(coO
W powyższej relacji będzie zachodziła równość funkcji sinusoidalnych, jeśli będą równe ich amplitudy. Mnożąc zatem obustronnie równanie przez co, otrzymujemy:
,— tg! coJ—L ■Jjk { Vc
j
_ ^ml 01/„
Oznaczając całkowity moment na swobodnym końcu analizowanego wału przez Tc, będzie on równy sumie momentów Tm + Tml, zatem możemy napisać:
stąd
Tc~Tm
co/2
T
ni
(OJz


)
Z powyższej relacji można wyznaczyć wielkość momentu Tm:
rrcJJk
yflk - CO/ztgf CoJZń
(5.15)
Podstawiając wyrażenie (5.15) do wzoru (5.7), otrzymamy ostateczne wyrażenie na kąt skręcenia wału:
|
( rr > rp • J Tc smj J—x [\/c , |
jsin(coO 1 | |||
|
OhJjk |
yflk - COJ jgfcoJ V V |
k ). |
( cos! CO^j |
Z |
(5.16)
W celu wyznaczenia pulsacji własnych tego układu należy przyrównać mianownik wyrażenia danego wzorem (5.16) do zera. W tym przypadku powoduje to ujawnienie się dodatkowych miejsc zerowych:
f ij
*fjk — COyv/ztgl (Oy^jjL
lub
(
tg! C0;

(5.17)
Zagadnienie rozwiązania równania (5.17) ze względu na zmienną C0ynajlepiej zilustrować rysunkiem.
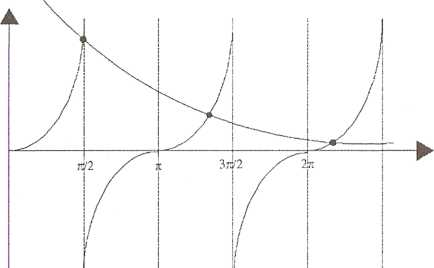
Rys. 12. Graficzna ilustracja rozwiązania równania (5.17)
Należy w tym miejscu przypomnieć, że wał mechaniczny analizowany jako układ ciągły ma nieskończenie wiele przeliczalnych pulsacji własnych (5.8). Jeśli jego swobodny koniec jest jeszcze wyposażony w element o innym, dodatkowym momencie bezwładności, to układ taki nie zmienia podstawowego, wcześniej wyznaczonego widma pulsacji, a jedynie ujawnia inne, dodatkowe widmo - i nieskończone, i przeliczalne, jak to wynika z rysunku 12.
Wyszukiwarka
Podobne podstrony:
40 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków stąd 71(2/2-1) 4 r (5.13) Aby sprawdzić,
126 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Współczynnik przenoszenia p dla
48 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Teraz wyrażenie (6.5) wynikające z drugi
34 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków przy warunkach brzegowych: ©0,0) = 0
A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Relacja (2.2) pozwala napisać wyrażenie na
U) A,S. Jagiełło, Systemy elektromechaniczne dla elektryków Wielkości W i stanowią ogólny zapis sił
IX A S Jagiełło, Systemy elektromechaniczne dla elektryków Przebieg strat na styku koło-szyna przeds
22 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Dla wyznaczenia macierzy sztywności
24 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków 24 A.S. Jagiełło, Systemy elektromechani
A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Ostatecznie więc pulsacja własna maszyny
28 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków dla obydwu zmiennych stają się niezależn
30 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Rys. 7. Charakterystyka rezonansowa siln
38 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Zauważmy, że: ( eya + e~- a Y l 2 J cos3
52 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków L<t 0 VF«,1. , * .
58 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków VI
66 A.S. Jagiełło, Systemy elektromechaniczne dla elektrykówNa rysunku 18, w kolejności od dołu, zazn
70 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków 70 A.S. Jagiełło, Systemy elektromechani
więcej podobnych podstron