39
70 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków
70 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków
|
LKdI'<* |
+ L |
dl(t2 |
|
" dt |
ni |
dt |
|
dlnl | ||
|
Lw P2 |
■ + L |
‘i1 |
|
w dt |
ni |
dt |
+ {K + R'j)l'm+R'd '1,2 = 0
(8.13c)
(8.13d)
Aby sformułować wyrażenia opisujące charakterystyki mechaniczne wału elektrycznego uproszczonego, postąpimy analogicznie jak w przypadku wału pełnego, wprowadzając zmienne zespolone. Wykonując żmudne, aczkolwiek proste przekształcenia algebraiczne, otrzymujemy poszukiwane wyrażenia opisujące charakterystyki mechaniczne silników wału elektrycznego uproszczonego:
3p[cTUph)2s R'j-2R'l R'd+X2k{ R\~2 R'd)s2 + R'd (r'1+2 R'w R'd-X2ks2\l -cos{poi))±2Xk R'd (R\,+ R'd) Mo {R'1+2 R'w Rj)1 +2Xl(R'l+2 R'w R'd+2R'iy + X^s4
Korzystanie z powyższego wyrażenia jest utrudnione ze wzglądu na jego dość złożoną strukturę. Również narysowanie charakterystyk mechanicznych, podobnie jak to było w przypadku wału pełnego, nie jest możliwe. Wobec powyższego rozważymy charakterystyki częściowe. I tak, różnicę momentów, jaką jest w stanie przenieść ten wał, wyrazi się wzorem:
A 71,=
“o (^'„f+2^ R'J +2X21(r'w1+2R'R'v + X,V
Przeprowadzając badanie powyższej funkcji o zmiennej niezależnej 5, otrzymamy:
ATI, =8 ATI
sin (pa)
(8.14)
s +2 1 + 2
slbs~+s&b
gdzie
ATb =
3 p{CyUj K
(itQXk 7?^+ R'd
{ R'2+2R'w R\
X
Teraz możemy narysować charakterystykę mechaniczną wału dla stałej wartok kąta jego skręcenia.
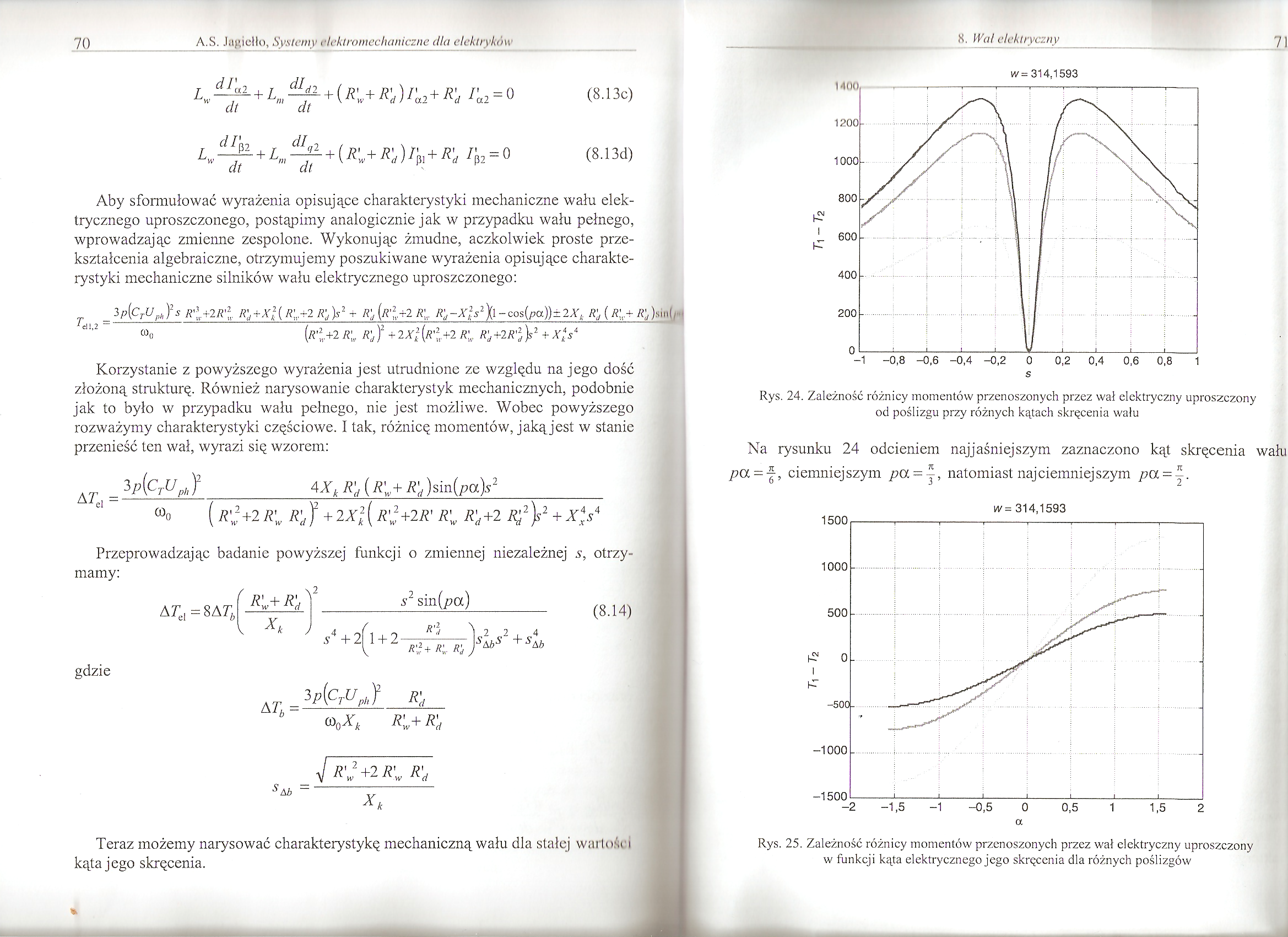
w =314,1593
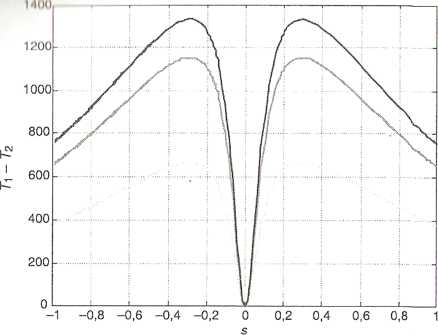
Rys. 24. Zależność różnicy momentów przenoszonych przez wał elektryczny uproszczony od poślizgu przy różnych kątach skręcenia wału
Na rysunku 24 odcieniem najjaśniejszym zaznaczono kąt skręcenia wału pa = -J, ciemniejszym pa = j, natomiast najciemniejszym pa = |.
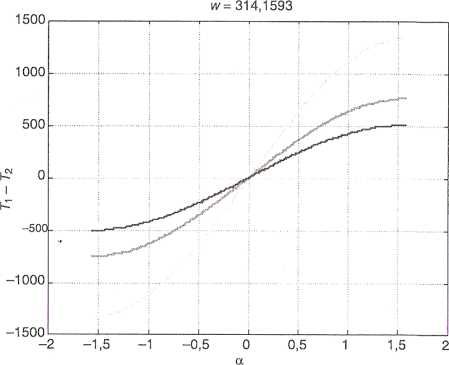
Rys. 25. Zależność różnicy momentów przenoszonych przez wał elektryczny uproszczony w funkcji kąta elektrycznego jego skręcenia dla różnych poślizgów
Wyszukiwarka
Podobne podstrony:
126 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Współczynnik przenoszenia p dla
42 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków stąd dla zerowych warunków początkowych
48 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Teraz wyrażenie (6.5) wynikające z drugi
34 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków przy warunkach brzegowych: ©0,0) = 0
A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Relacja (2.2) pozwala napisać wyrażenie na
U) A,S. Jagiełło, Systemy elektromechaniczne dla elektryków Wielkości W i stanowią ogólny zapis sił
IX A S Jagiełło, Systemy elektromechaniczne dla elektryków Przebieg strat na styku koło-szyna przeds
22 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Dla wyznaczenia macierzy sztywności
24 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków 24 A.S. Jagiełło, Systemy elektromechani
A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Ostatecznie więc pulsacja własna maszyny
28 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków dla obydwu zmiennych stają się niezależn
30 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Rys. 7. Charakterystyka rezonansowa siln
38 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Zauważmy, że: ( eya + e~- a Y l 2 J cos3
40 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków stąd 71(2/2-1) 4 r (5.13) Aby sprawdzić,
52 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków L<t 0 VF«,1. , * .
58 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków VI
66 A.S. Jagiełło, Systemy elektromechaniczne dla elektrykówNa rysunku 18, w kolejności od dołu, zazn
więcej podobnych podstron