18

28 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków
dla obydwu zmiennych stają się niezależne od amplitudy funkcji wymuszającej i wyrażają się następującymi wzorami - dla pulsacji (częstości) kątowej wirnika otrzymujemy: przy Um = 0
28 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków
co*., =
(4.14a)
przy T = 0
(4.14b)
- W~Ri
Dla prądu twomika odpowiednie wielkości wyrażają się wzorami: przy Um = 0
JL.
(4.15a)
przy Tm =0
co.
(4.15b)
Własność systemu elektromechanicznego, polegająca na zależności pulsacji rezonansowej od amplitudy działających na niego wymuszeń okresowych powoduje, że niezmiernie trudno jest określić a priori jego zachowanie się we współpracy z innymi oscylacyjnymi elementami systemu. Jednak w warunkach technicznych trudno wyobrazić sobie sytuację, w której pulsacja pobudzająca układ tak od strony mechanicznej, jak i elektrycznej charakteryzowałaby się tą samą częstotliwością.
Aby lepiej unaocznić zjawiska drgań rezonansowych prostego systemu elektromechanicznego, jakim jest maszyna prądu stałego, zostaną przedstawione przykładowe charakterystyki rezonansowe.
Na rysunkach 5 i 6 opisano zależność amplitud oscylacji prądu twornika. Z rysunków tych wynika, że silnik daje zróżnicowaną odpowiedź jedynie przy zmieniających się amplitudach składowej przemiennej napięcia zasilającego. Natomiast dla zróżnicowanych składowych przemiennych momentu obciążenia charakterystyki rezonansowe nie wykazują istotnych różnic. Analogicznie wygląda sprawa, jeśli chodzi o charakterystyki rezonansowe dla pulsacji kątowej twomika (wirnika) (rys. 7 i 8). Niemniej jednak, porównując charakterystyki rezonansowe dla prądu twomika i pulsacji kątowej wirnika, zauważamy różne wartości pulsacji rezonansowej.
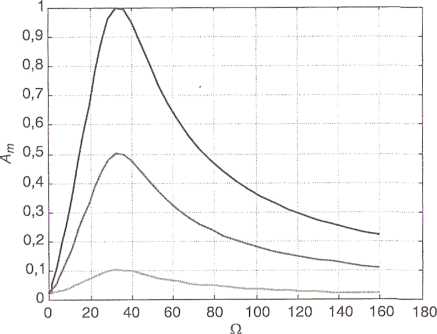
Rys. 5. Charakterystyka rezonansowa silnika obcowzbudnego przy różnych amplitudach składowej przemiennej napięcia twornika, gdzie Am jest amplitudą funkcji prądu
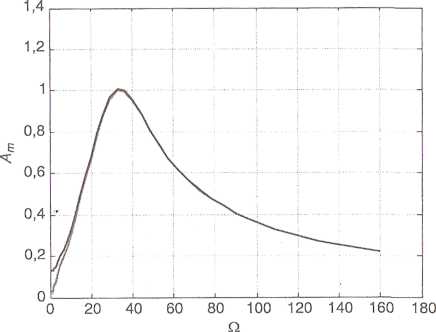
Rys. 6. Charakterystyka rezonansowa silnika obcowzbudnego przy różnych amplitudach składowej przemiennej momentu obciążenia, gdzie A,„ jest amplitudą funkcji prądu
Wyszukiwarka
Podobne podstrony:
126 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Współczynnik przenoszenia p dla
42 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków stąd dla zerowych warunków początkowych
48 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Teraz wyrażenie (6.5) wynikające z drugi
34 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków przy warunkach brzegowych: ©0,0) = 0
A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Relacja (2.2) pozwala napisać wyrażenie na
U) A,S. Jagiełło, Systemy elektromechaniczne dla elektryków Wielkości W i stanowią ogólny zapis sił
IX A S Jagiełło, Systemy elektromechaniczne dla elektryków Przebieg strat na styku koło-szyna przeds
22 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Dla wyznaczenia macierzy sztywności
24 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków 24 A.S. Jagiełło, Systemy elektromechani
A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Ostatecznie więc pulsacja własna maszyny
30 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Rys. 7. Charakterystyka rezonansowa siln
38 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Zauważmy, że: ( eya + e~- a Y l 2 J cos3
40 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków stąd 71(2/2-1) 4 r (5.13) Aby sprawdzić,
52 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków L<t 0 VF«,1. , * .
58 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków VI
66 A.S. Jagiełło, Systemy elektromechaniczne dla elektrykówNa rysunku 18, w kolejności od dołu, zazn
70 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków 70 A.S. Jagiełło, Systemy elektromechani
więcej podobnych podstron