14
Ml A S Jagiełło, Systemy elektromechaniczne diet elektryków
• ,lt»4ll myjąć, źe elementy a(j macierzy A są stałe, to powyższe równanie w /wni tym ujęciu macierzowym można napisać:
Adq + dB_ + K qt = w (3.5)
dt dt
gdzie W jest kolumnową macierzą wymuszeń.
W zdecydowanie większej ilości przypadków systemy elektromechaniczne składają się z elementów wykonujących ruch obrotowy. Z kolei, poza szczególnymi przypadkami, wirujące części maszyn są wyważone, stąd na obecnym etapie rozważań przyjmiemy, że macierz G jest tożsamościowo równa zeru. Jeśli ograniczyć jeszcze nasze rozważania do układów pozbawionych remanencji (magnetyzmu szczątkowego), to macierzowe równanie (3.5) przyjmie postać:
A—+ Kr/ = W
dt
Dla wyznaczenia macierzy sztywności dynamicznej przyjmijmy macierz wymuszeń w postaci:
W = W/H sin(coć) - D<ż ostatecznie więc równanie powyższe przyjmie postać:
A-^4 + D^ + K? = W„, sin(oM) (3.6)
dr dt
Poszukując rozwiązania asymptotycznego powyższego równania macierzowego, zastosujemy rachunek symboliczny. Możemy wtedy napisać:
(k - O)2 A + y'coD)Q = W
stąd
Q =[k-co2A + ycoD^W (3.7)
Macierz [k-co2A+ /'cod] _I w literaturze przedmiotu [2] oznaczana jest przez /, i nazywana „zespoloną macierzą sztywności dynamicznej”. Macierz do niej odwrotna nosi nazwę „zespolonej macierzy podatności dynamicznej”. I)l;i przypadków układów, dla których można pominąć straty, macierze te noszą nazwy, odpowiednio: „macierz sztywności dynamicznej” i „macierz podatności dynamicznej”.
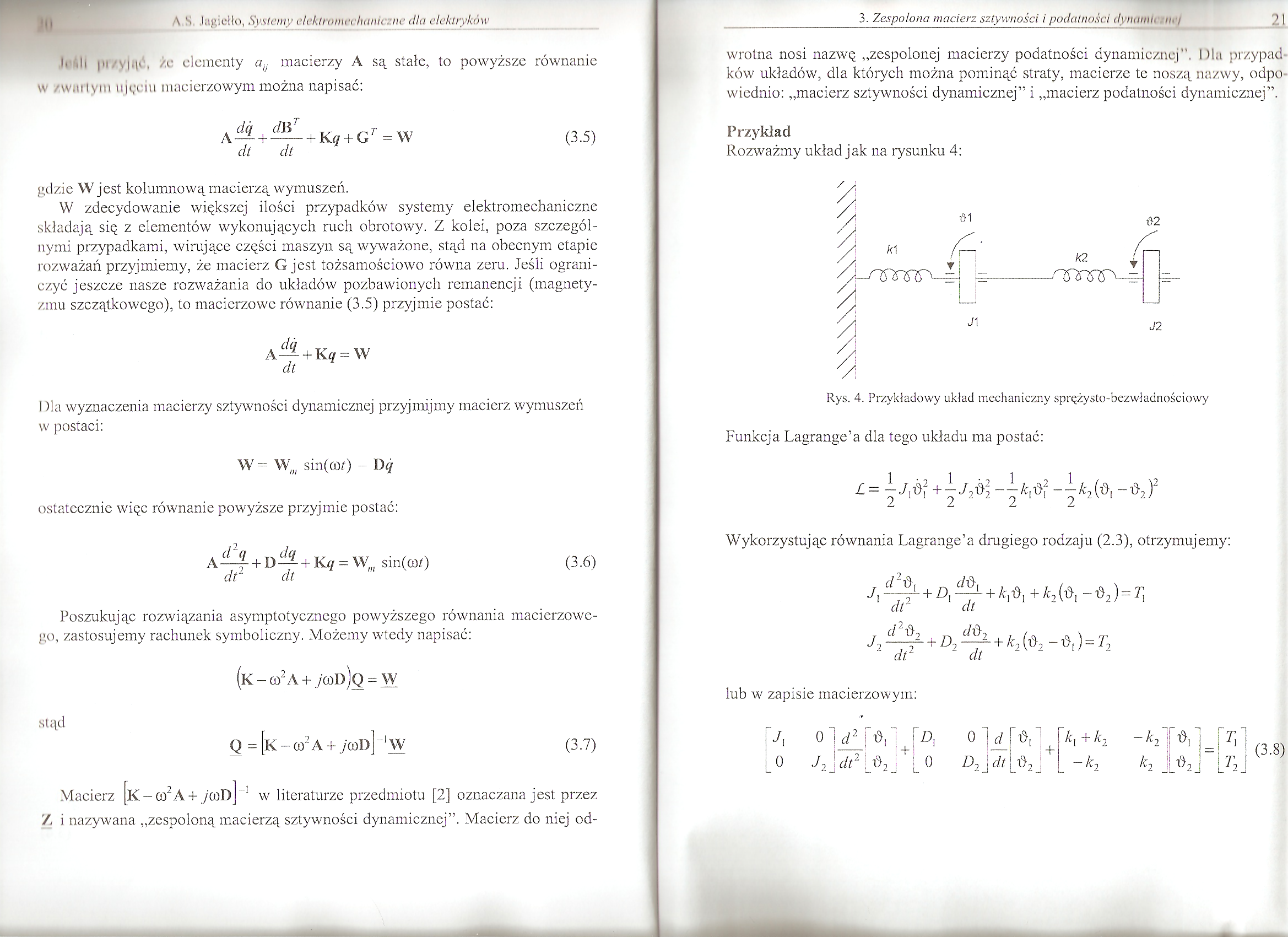
Przykład
Rozważmy układ jak na rysunku 4:
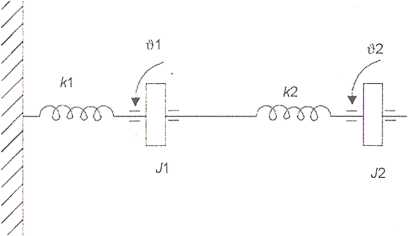
Rys. 4. Przykładowy układ mechaniczny sprężysto-bezwładnościowy Funkcja Lagrange’a dla tego układu ma postać:

Wykorzystując równania Lagrange’a drugiego rodzaju (2.3), otrzymujemy:
d2A n d$.


lub w zapisie macierzowym:
Wyszukiwarka
Podobne podstrony:
126 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Współczynnik przenoszenia p dla
42 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków stąd dla zerowych warunków początkowych
48 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Teraz wyrażenie (6.5) wynikające z drugi
34 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków przy warunkach brzegowych: ©0,0) = 0
A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Relacja (2.2) pozwala napisać wyrażenie na
U) A,S. Jagiełło, Systemy elektromechaniczne dla elektryków Wielkości W i stanowią ogólny zapis sił
IX A S Jagiełło, Systemy elektromechaniczne dla elektryków Przebieg strat na styku koło-szyna przeds
22 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Dla wyznaczenia macierzy sztywności
24 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków 24 A.S. Jagiełło, Systemy elektromechani
A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Ostatecznie więc pulsacja własna maszyny
28 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków dla obydwu zmiennych stają się niezależn
30 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Rys. 7. Charakterystyka rezonansowa siln
38 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Zauważmy, że: ( eya + e~- a Y l 2 J cos3
40 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków stąd 71(2/2-1) 4 r (5.13) Aby sprawdzić,
52 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków L<t 0 VF«,1. , * .
58 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków VI
66 A.S. Jagiełło, Systemy elektromechaniczne dla elektrykówNa rysunku 18, w kolejności od dołu, zazn
więcej podobnych podstron