41
14 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków
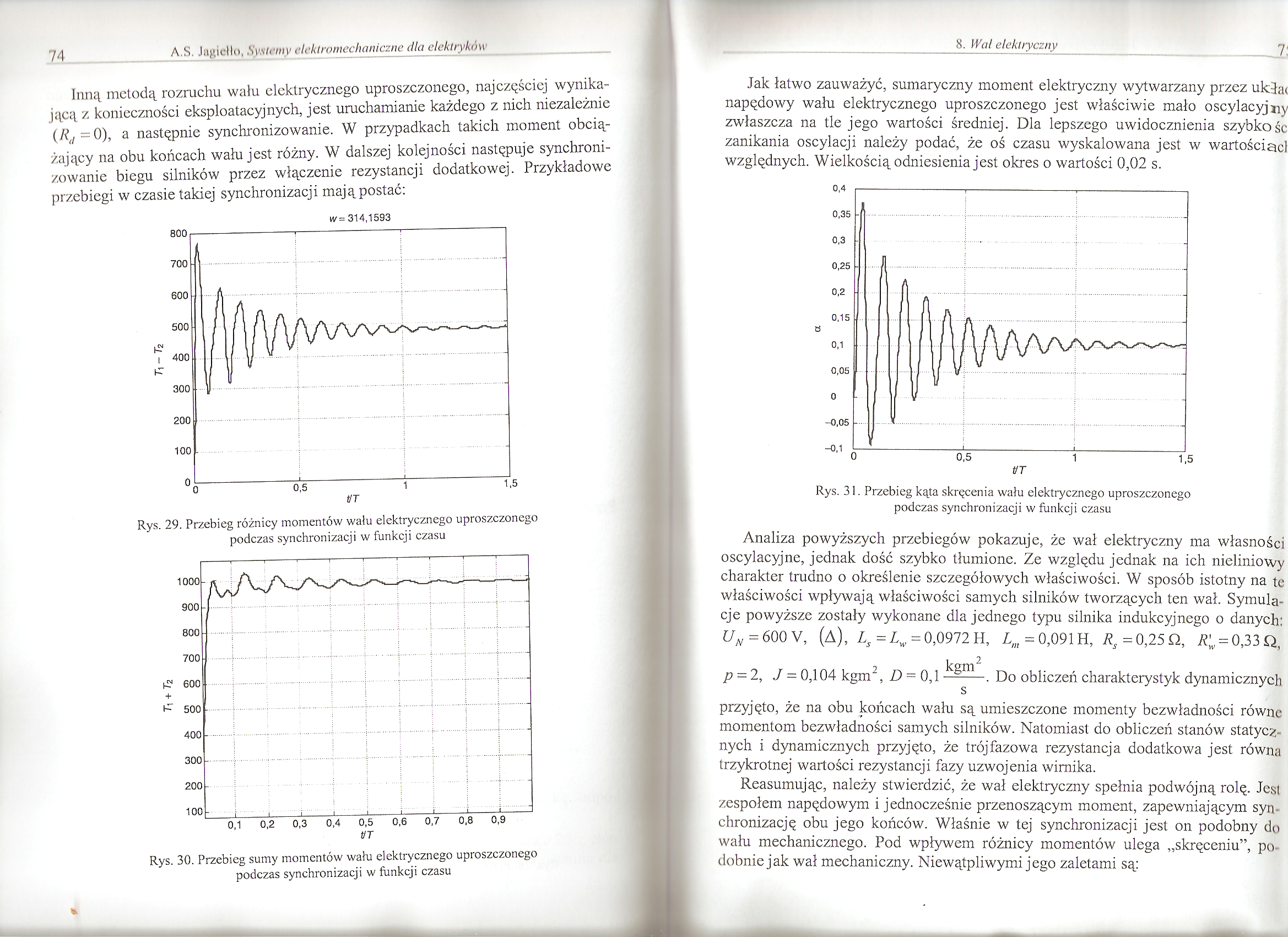
Inną metodą rozruchu wału elektrycznego uproszczonego, najczęściej wynikającą z konieczności eksploatacyjnych, jest uruchamianie każdego z nich niezależnie (7^=0), a następnie synchronizowanie. W przypadkach takich moment obciążający na obu końcach walu jest różny. W dalszej kolejności następuje synchronizowanie biegu silników przez włączenie rezystancji dodatkowej. Przykładowe przebiegi w czasie takiej synchronizacji mają postać:
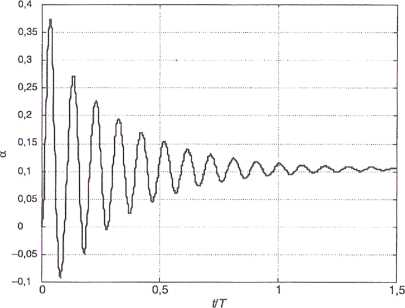
Rys. 29. Przebieg różnicy momentów wału elektrycznego uproszczonego podczas synchronizacji w funkcji czasu
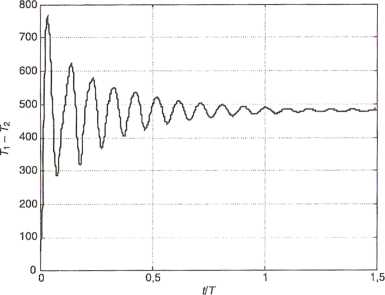
Rys. 30. Przebieg sumy momentów wału elektrycznego uproszczonego podczas synchronizacji w funkcji czasu
Jak łatwo zauważyć, sumaryczny moment elektryczny wytwarzany przez uk-lat napędowy wału elektrycznego uproszczonego jest właściwie mało oscylacyjny zwłaszcza na tle jego wartości średniej. Dla lepszego uwidocznienia szybkość zanikania oscylacji należy podać, że oś czasu wyskalowana jest w wartościacl względnych. Wielkością odniesienia jest okres o wartości 0,02 s.
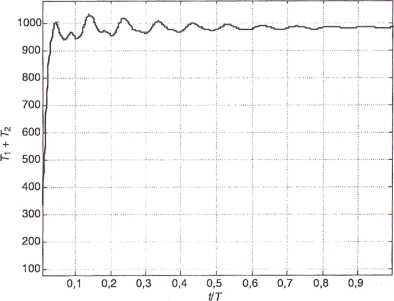
Rys. 31. Przebieg kąta skręcenia wału elektrycznego uproszczonego podczas synchronizacji w funkcji czasu
Analiza powyższych przebiegów pokazuje, że wał elektryczny ma własności oscylacyjne, jednak dość szybko tłumione. Ze względu jednak na ich nieliniowy charakter trudno o określenie szczegółowych właściwości. W sposób istotny na te właściwości wpływają właściwości samych silników tworzących ten wał. Symulacje powyższe zostały wykonane dla jednego typu silnika indukcyjnego o danych: UN = 600 V, (A), 4 =Zw= 0,0972 H, Lm =0,091 H, Rs -0,25 Q, R'w = 0,33 Q, kgm2
s
przyjęto, że na obu końcach wału są umieszczone momenty bezwładności równe momentom bezwładności samych silników. Natomiast do obliczeń stanów statycznych i dynamicznych przyjęto, że trójfazowa rezystancja dodatkowa jest równa trzykrotnej wartości rezystancji fazy uzwojenia wirnika.

7 = 0,104 kgm2, Z) = 0,1
P = 2,
Do obliczeń charakterystyk dynamicznych
Reasumując, należy stwierdzić, że wał elektryczny spełnia podwójną rolę. Jest zespołem napędowym i jednocześnie przenoszącym moment, zapewniającym synchronizację obu jego końców. Właśnie w tej synchronizacji jest on podobny do wału mechanicznego. Pod wpływem różnicy momentów ulega „skręceniu”, podobnie jak wał mechaniczny. Niewątpliwymi jego zaletami są:
Wyszukiwarka
Podobne podstrony:
126 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Współczynnik przenoszenia p dla
42 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków stąd dla zerowych warunków początkowych
48 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Teraz wyrażenie (6.5) wynikające z drugi
34 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków przy warunkach brzegowych: ©0,0) = 0
A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Relacja (2.2) pozwala napisać wyrażenie na
U) A,S. Jagiełło, Systemy elektromechaniczne dla elektryków Wielkości W i stanowią ogólny zapis sił
IX A S Jagiełło, Systemy elektromechaniczne dla elektryków Przebieg strat na styku koło-szyna przeds
22 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Dla wyznaczenia macierzy sztywności
24 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków 24 A.S. Jagiełło, Systemy elektromechani
A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Ostatecznie więc pulsacja własna maszyny
28 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków dla obydwu zmiennych stają się niezależn
30 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Rys. 7. Charakterystyka rezonansowa siln
38 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Zauważmy, że: ( eya + e~- a Y l 2 J cos3
40 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków stąd 71(2/2-1) 4 r (5.13) Aby sprawdzić,
52 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków L<t 0 VF«,1. , * .
58 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków VI
66 A.S. Jagiełło, Systemy elektromechaniczne dla elektrykówNa rysunku 18, w kolejności od dołu, zazn
więcej podobnych podstron