42
7() A.S. Jagiełło, Systemy elektromechaniczne dla elektryków
• Niewrażliwość na przekroczenie dopuszczalnych momentów. „Zerwanie” wału nie niesie ze sobą skutków awaryjnych dla niego samego. Można powiedzieć, że po zniknięciu przeciążenia „regeneruje” się sam.
• Elementy napędowe, które taki wał ma łączyć, mogą być umieszczone w dowolnej względem siebie konfiguracji geometrycznej.
Największą natomiast jego wadą, w porównaniu z wałem mechanicznym, jest jego niższa sprawność. Oczywiście, należy tu uwzględniać tylko tę część wału elektrycznego, która jest odpowiedzialna za różnice obciążeń na obu jego końcach.
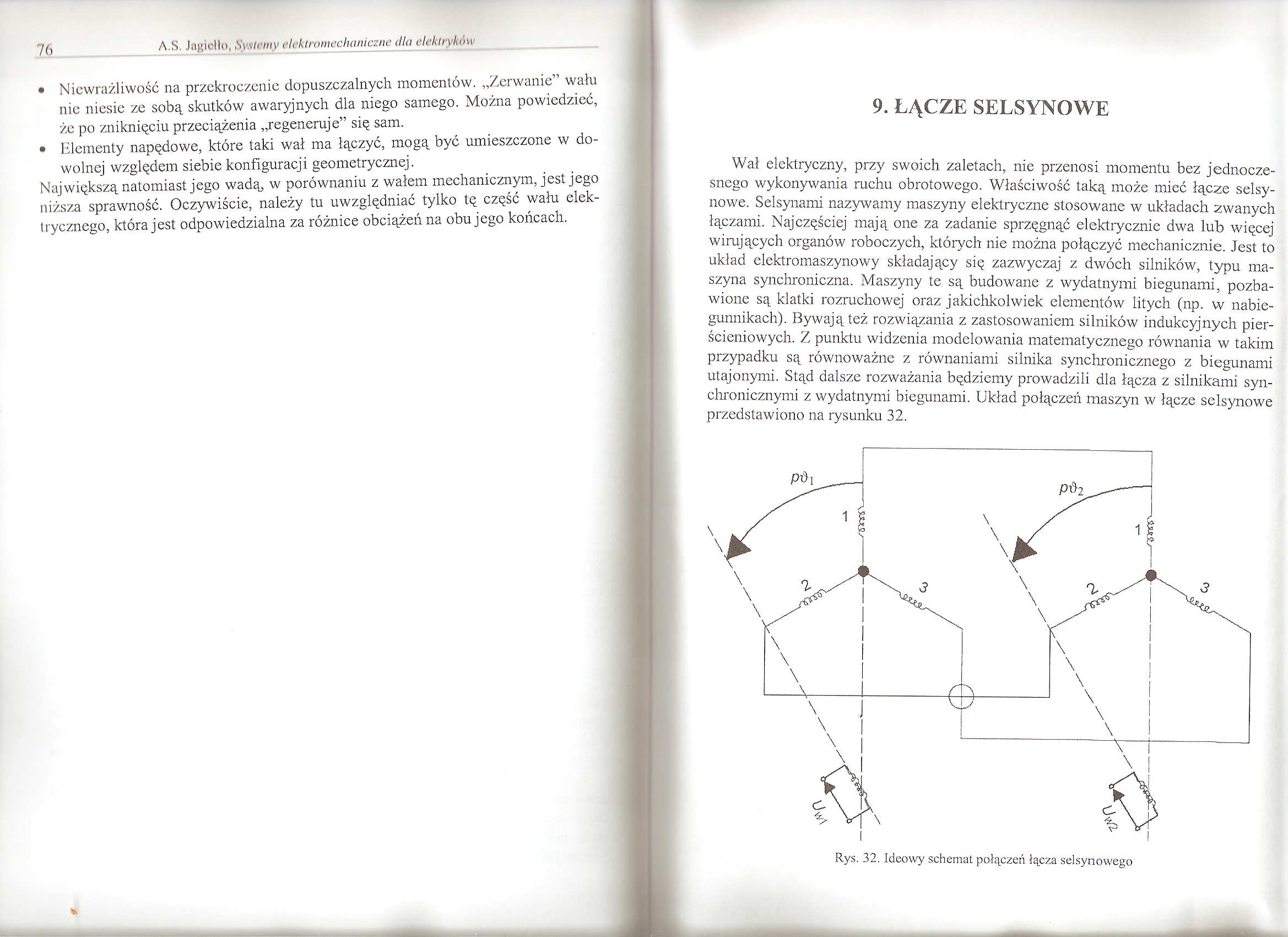
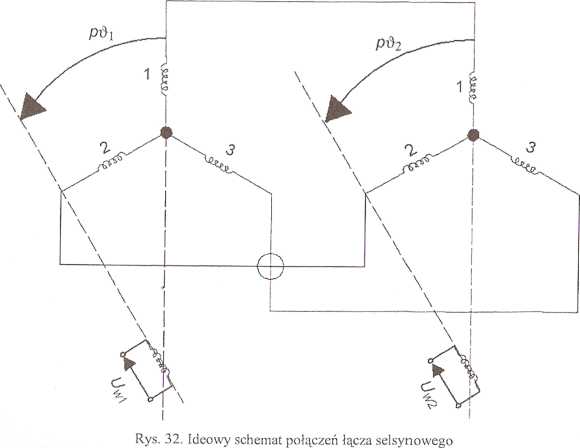
9. ŁĄCZE SELSYNOWE
Wał elektryczny, przy swoich zaletach, nie przenosi momentu bez jednoczesnego wykonywania ruchu obrotowego. Właściwość taką może mieć łącze selsy-nowe. Selsynami nazywamy maszyny elektryczne stosowane w układach zwanych łączami. Najczęściej mają one za zadanie sprzęgnąć elektrycznie dwa lub więcej wirujących organów roboczych, których nie można połączyć mechanicznie. Jest to układ elektromaszynowy składający się zazwyczaj z dwóch silników, typu maszyna synchroniczna. Maszyny te są budowane z wydatnymi biegunami, pozbawione są klatki rozruchowej oraz jakichkolwiek elementów litych (np. w nabie-gunnikach). Bywają też rozwiązania z zastosowaniem silników indukcyjnych pierścieniowych. Z punktu widzenia modelowania matematycznego równania w takim przypadku są równoważne z równaniami silnika synchronicznego z biegunami utajonymi. Stąd dalsze rozważania będziemy prowadzili dla łącza z silnikami synchronicznymi z wydatnymi biegunami. Układ połączeń maszyn w łącze selsynowe przedstawiono na rysunku 32.
Wyszukiwarka
Podobne podstrony:
A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Relacja (2.2) pozwala napisać wyrażenie na
IX A S Jagiełło, Systemy elektromechaniczne dla elektryków Przebieg strat na styku koło-szyna przeds
126 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Współczynnik przenoszenia p dla
42 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków stąd dla zerowych warunków początkowych
48 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Teraz wyrażenie (6.5) wynikające z drugi
34 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków przy warunkach brzegowych: ©0,0) = 0
U) A,S. Jagiełło, Systemy elektromechaniczne dla elektryków Wielkości W i stanowią ogólny zapis sił
22 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Dla wyznaczenia macierzy sztywności
24 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków 24 A.S. Jagiełło, Systemy elektromechani
A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Ostatecznie więc pulsacja własna maszyny
28 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków dla obydwu zmiennych stają się niezależn
30 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Rys. 7. Charakterystyka rezonansowa siln
38 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Zauważmy, że: ( eya + e~- a Y l 2 J cos3
40 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków stąd 71(2/2-1) 4 r (5.13) Aby sprawdzić,
52 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków L<t 0 VF«,1. , * .
58 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków VI
66 A.S. Jagiełło, Systemy elektromechaniczne dla elektrykówNa rysunku 18, w kolejności od dołu, zazn
więcej podobnych podstron