43
7K A.S. Jagiełło, Systemy elektromechaniczne dla elektryków
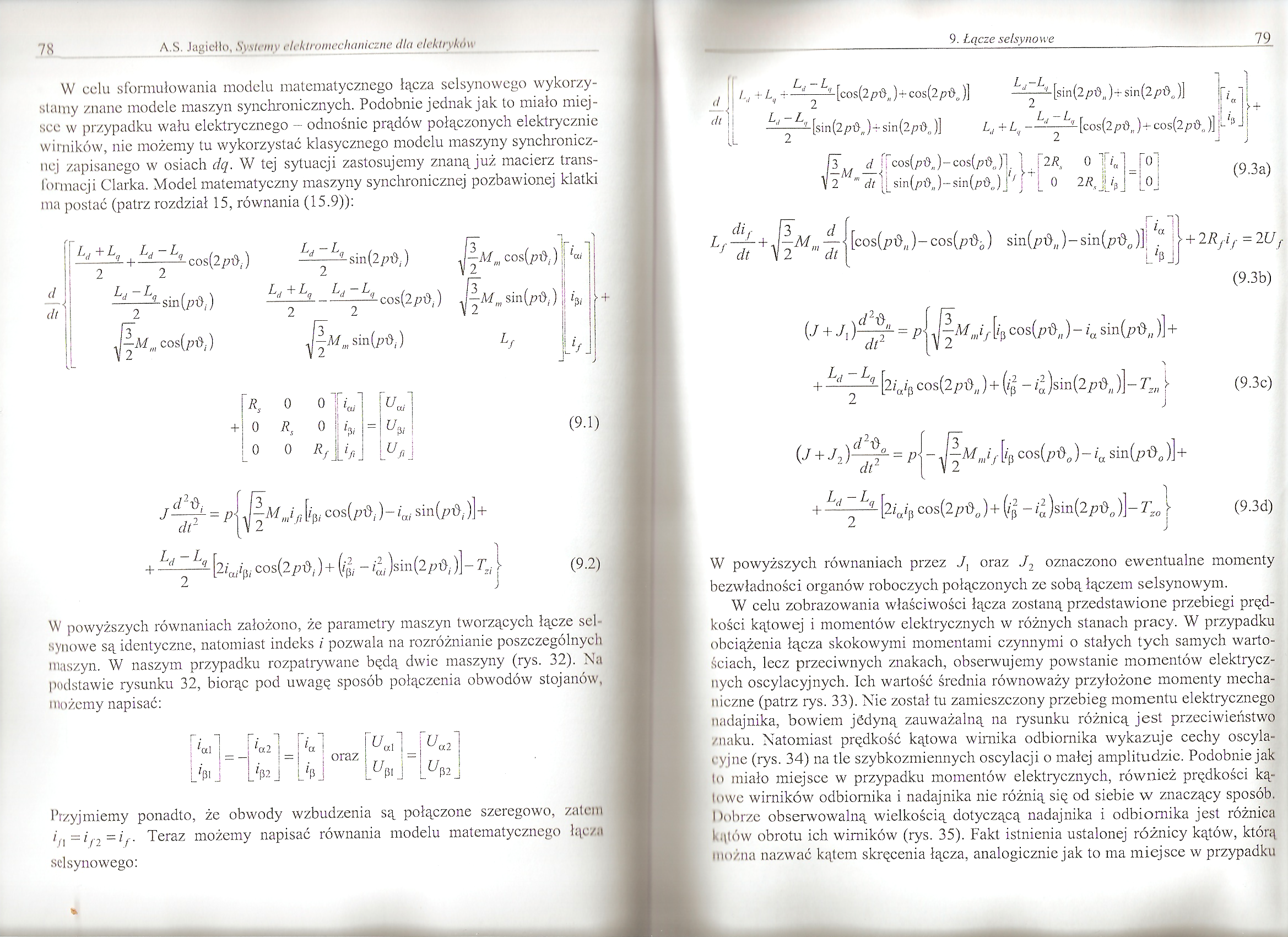
W celu sformułowania modelu matematycznego łącza selsynowego wykorzystamy znane modele maszyn synchronicznych. Podobnie jednak jak to miało miejsce w przypadku wału elektrycznego - odnośnie prądów połączonych elektrycznie wirników, nie możemy tu wykorzystać klasycznego modelu maszyny synchronicznej zapisanego w osiach dq. W tej sytuacji zastosujemy znaną już macierz transformacji Clarka. Model matematyczny maszyny synchronicznej pozbawionej klatki ma postać (patrz rozdział 15, równania (15.9)):

W powyższych równaniach założono, że parametry maszyn tworzących łącze sel-synowe są identyczne, natomiast indeks / pozwala na rozróżnianie poszczególnych maszyn. W naszym przypadku rozpatrywane będą dwie maszyny (rys. 32). Na podstawie rysunku 32, biorąc pod uwagę sposób połączenia obwodów stojanów, możemy napisać:
|
M |
i r- i II Z«2 |
IM |
oraz 1 |
X,] j |
pya2l |
|
L'pi _ |
U2 j |
LZP J |
c: “C3 to 1__ |
Przyjmiemy ponadto, że obwody wzbudzenia są połączone szeregowo, zatem in=i =i Teraz możemy napisać równania modelu matematycznego łącza
selsynowego:
,1 L.i +L"+- 0 Z'?-[C0S(2P^„)+CQS(2p^J] Lj L“ [sin(2/?d.)+sin(2^J] lff l]
L'' 0 L" [sinfcjpftj-i- sin(2pń0)] Ld + Lq ~^[cos(2/?d„) + cos(2/7^0)] p J j
L £ Ł J J
!° i
1 o!
(9.3a)
[T d(fcos(pVj--cos(p»Ą 1 , \2RS O Jia
V 2 dt ^[sin(/jdJ--sin(pdJj/J [ O 2Rs jj /0
L/~dt + "\|f^^ j[cos^d»^“C0S^^ sinUJ-sin^)]: “ j| + 2^/i/ = 2(7/
(9.3b)
(J + J\ )^f- = tp C0S(M,) - *« sin(pi5„)] +
+ lj—Lą [2/oĄ cos(2/?i3-<l) + - g )sin(2/?^„)]- Tzn i (9.3c)
1 J
(J + J^~[fL = cos(ptij-ż0 sin(ptfj]+
+ “T ~ [2*aip cos(2pi30) + (/p2 - i2a )sin(2/?i30)]- Tz0 \ (9.3d)
1 J
W powyższych równaniach przez 7, oraz J2 oznaczono ewentualne momenty bezwładności organów roboczych połączonych ze sobą łączem selsynowym.
W celu zobrazowania właściwości łącza zostaną przedstawione przebiegi prędkości kątowej i momentów elektrycznych w różnych stanach pracy. W przypadku obciążenia łącza skokowymi momentami czynnymi o stałych tych samych wartościach, lecz przeciwnych znakach, obserwujemy powstanie momentów elektrycznych oscylacyjnych. Ich wartość średnia równoważy przyłożone momenty mechaniczne (patrz rys. 33). Nie został tu zamieszczony przebieg momentu elektrycznego nadajnika, bowiem jedyną zauważalną na rysunku różnicą jest przeciwieństwo znaku. Natomiast prędkość kątowa wirnika odbiornika wykazuje cechy oscylacyjne (rys. 34) na tle szybkozmiennych oscylacji o małej amplitudzie. Podobnie jak lo miało miejsce w przypadku momentów elektrycznych, również prędkości kątowe wirników odbiornika i nadajnika nie różnią się od siebie w znaczący sposób.
I )obrze obserwowalną wielkością dotyczącą nadajnika i odbiornika jest różnica kitów obrotu ich wirników (rys. 35). Fakt istnienia ustalonej różnicy kątów, którą można nazwać kątem skręcenia łącza, analogicznie jak to ma miejsce w przypadku
Wyszukiwarka
Podobne podstrony:
126 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Współczynnik przenoszenia p dla
42 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków stąd dla zerowych warunków początkowych
48 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Teraz wyrażenie (6.5) wynikające z drugi
34 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków przy warunkach brzegowych: ©0,0) = 0
A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Relacja (2.2) pozwala napisać wyrażenie na
U) A,S. Jagiełło, Systemy elektromechaniczne dla elektryków Wielkości W i stanowią ogólny zapis sił
IX A S Jagiełło, Systemy elektromechaniczne dla elektryków Przebieg strat na styku koło-szyna przeds
22 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Dla wyznaczenia macierzy sztywności
24 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków 24 A.S. Jagiełło, Systemy elektromechani
A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Ostatecznie więc pulsacja własna maszyny
28 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków dla obydwu zmiennych stają się niezależn
30 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Rys. 7. Charakterystyka rezonansowa siln
38 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków Zauważmy, że: ( eya + e~- a Y l 2 J cos3
40 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków stąd 71(2/2-1) 4 r (5.13) Aby sprawdzić,
52 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków L<t 0 VF«,1. , * .
58 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków VI
66 A.S. Jagiełło, Systemy elektromechaniczne dla elektrykówNa rysunku 18, w kolejności od dołu, zazn
więcej podobnych podstron