23 luty 07 (11)
Niejednokrotnie zachodzi potrzeba uwzględnienia odkształcalności (podatności) niektórych członów. Dotyczy to w szczególności takich elementów, jak resory, sprężyny, poduszki powietrzne, których podatność ma zasadniczy wpływ na ruch mechanizmu. W takich przypadkach niektóre z członów mechanizmu traktuje się jako sprężyste, a pozostałe jako idealnie sztywne. Można wtedy mówić o dyskretnym rozkładzie parametrów inercyjno-sprężystych elementów mechanizmu.
Jeszcze inne podejście polega na traktowaniu wszystkich bez wyjątku członów jako podatnych. Przyjmuje się wówczas, że podatność niektórych członów, takich jak sprężyny, resory itp. ma charakter dyskretny, a pozostałe, np. korbowody, łączniki, wahacze modelowane są jako układy o ciągłym rozkładzie parametrów iner-cyjno-dyssypatywno-sprężystych. Mechanizm jako całość ma w tym przypadku strukturę dyskretno-ciągłą.
Wszystkie pojęcia, definicje oraz przykładowe analizy zawarte w niniejszej książce dotyczyć będą mechanizmów z członami sztywnymi. Przykłady ruchomych i nieruchomych członów mechanizmów przedstawia rysunek 1.1.
1.1.2. Stopnie swobody członu sztywnego
Liczbą stopni swobody członu sztywnego (bryły sztywnej) nazywamy liczbę niezależnych współrzędnych uogólnionych określających jego położenie w przestrzeni względem wybranego układu odniesienia.
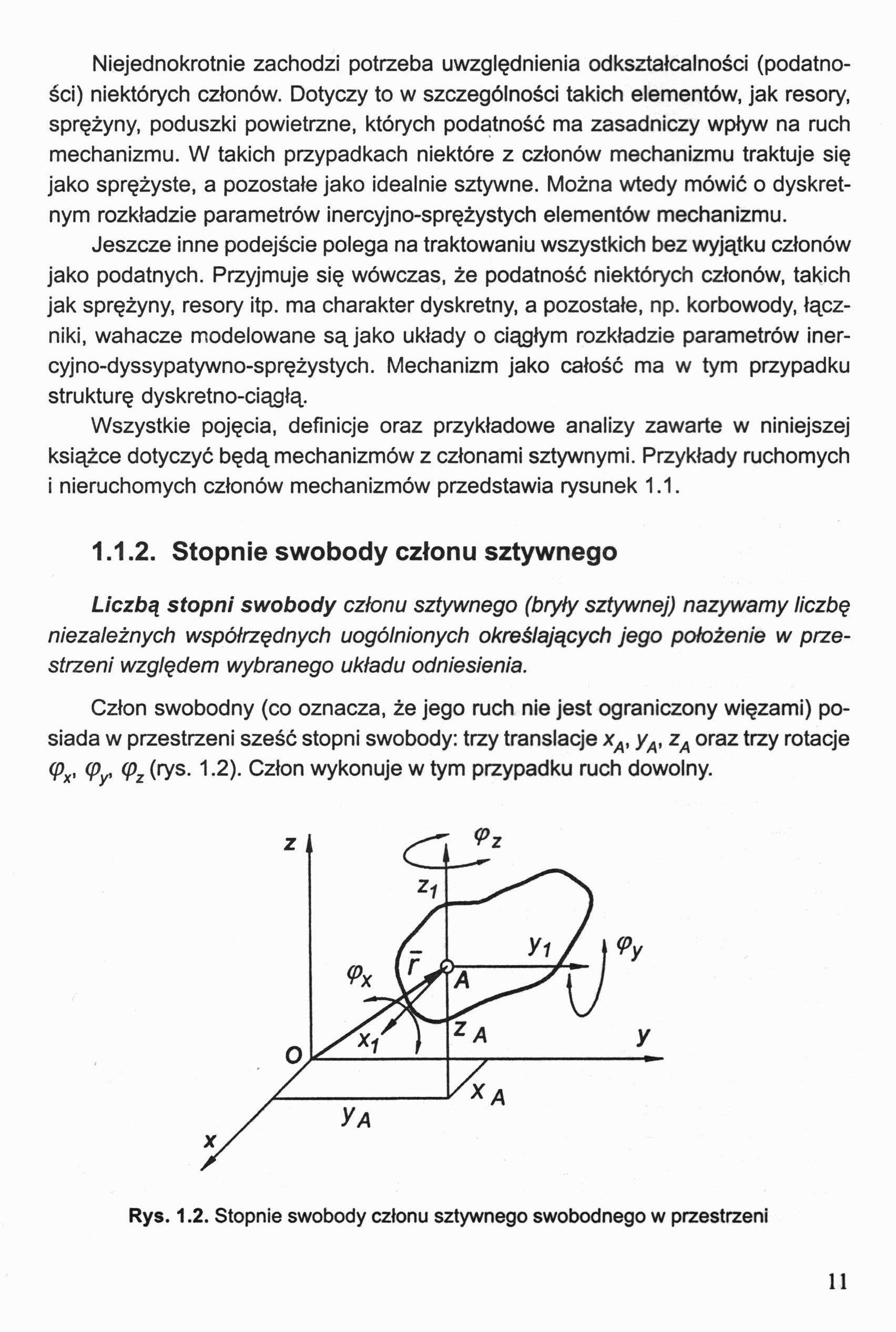
Człon swobodny (co oznacza, że jego ruch nie jest ograniczony więzami) posiada w przestrzeni sześć stopni swobody: trzy translacje xA, yA, zA oraz trzy rotacje (px, cpy, (pz (rys. 1.2). Człon wykonuje w tym przypadku ruch dowolny.

Rys. 1.2. Stopnie swobody członu sztywnego swobodnego w przestrzeni
11
Wyszukiwarka
Podobne podstrony:
23 luty 07 (126) Proponowany sposób oswobadzania od więzów jest wygodny przy rozwiązywaniu zadań z u
23 luty 07 (127) rysunki 3.11 b i c - dwa rozłączone człony z przyłożonymi siłami reakcji przesunięt
23 luty 07 (21) Przykład 1.1 n = 3p1 = 0,p2 = 0, p3= 1, p4=1, ps=2 Rys. 1.11. Przestrzenny czworobok
23 luty 07 * * AA>TEORIA MASZYN I $ Q19-2004 JOZEF FELIS, HUBERT JAWOROWSKI, JACEK CIEŚLIK * *CZE
23 luty 07 (100) a) Koło centralne nieruchome średnica podziałowa kola 3 wyznaczona na podstawie war
23 luty 07 (101a) Analiza kinematyczna przekładni obiegowych Przekładnie obiegowe mają w ogólnym prz
23 luty 07 (101) Rys. 2.44. Schematy przekładni obiegowej z zaznaczonymi prędkościami kątowymi: a) b
23 luty 07 (102) koło bjest nieruchome, cob = 0, natomiast koło a i jarzmo są członami ruchomymi, ry
23 luty 07 (103) Dla przekładni o dwóch stopniach swobody (przekładnia różnicowa, rys. 2.44a), w któ
23 luty 07 (104) Rys. 2.45. Przekładnia obiegowa jednorzędowa o jednym stopniu swobody: a) schemat k
23 luty 07 (105) Ostatecznie przełożenie przekładni obiegowej wyniesiez3y Zj+z3 Zł) Z1 (P2.97) Przeł
23 luty 07 (106) Znak (-) we wzorze (P2.102) oznacza, że zwrot prędkości kątowej satelity 2 jest prz
23 luty 07 (107) Ostatecznie: r-t r2 r-, i • = — ---=— o)1 =---a>i 1 &nbs
23 luty 07 (108) Rozwiązanie Przełożenie przekładni można zapisać /)3 = —. 3j Wykorzystamy wzór na
23 luty 07 (109) Rozwiązanie Przełożenie przekładni obliczamy podobnie jak przełożenie iJ23 w przykł
23 luty 07 (10) Ciało sztywne to układ punktów materialnych, w którym wzajemne odległości dwóch dowo
23 luty 07 (110) Schemat kompletnej przekładni różnicowej stożkowej oraz jej schemat bez przesztywni
23 luty 07 (111) Zróżnicowanie prędkości kół umożliwia przekładnia stożkowa złożona z kół 3, 4 i 5,
23 luty 07 (112) Rys. 2.51. Schemat konstrukcyjny przekładni kształtowo-tocznej, e- mimośród - Rys.
więcej podobnych podstron