24 luty 07 (152)
Dobierając długość elementu (z uwzględnieniem znaku a także jego
położenie wzdłuż członu, można wskazać dowolny punkt na płaszczyźnie łącznika lub suwaka.
Położenie elementu na łączniku zadane jest za pomocą parametru U. W przypadku U = 0 lub U = 1 element znajduje się na jednym z końców łącznika, wartość 0 < U < 1 oznacza położenie wewnątrz, natomiast U >1 lub U < 0 oznacza, że element wychodzi poza odcinek łącznika, jednak dalej należy do tego samego członu. Położenie elementów na suwaku zostaje określone poprzez zadanie odpowiednich wymiarów.
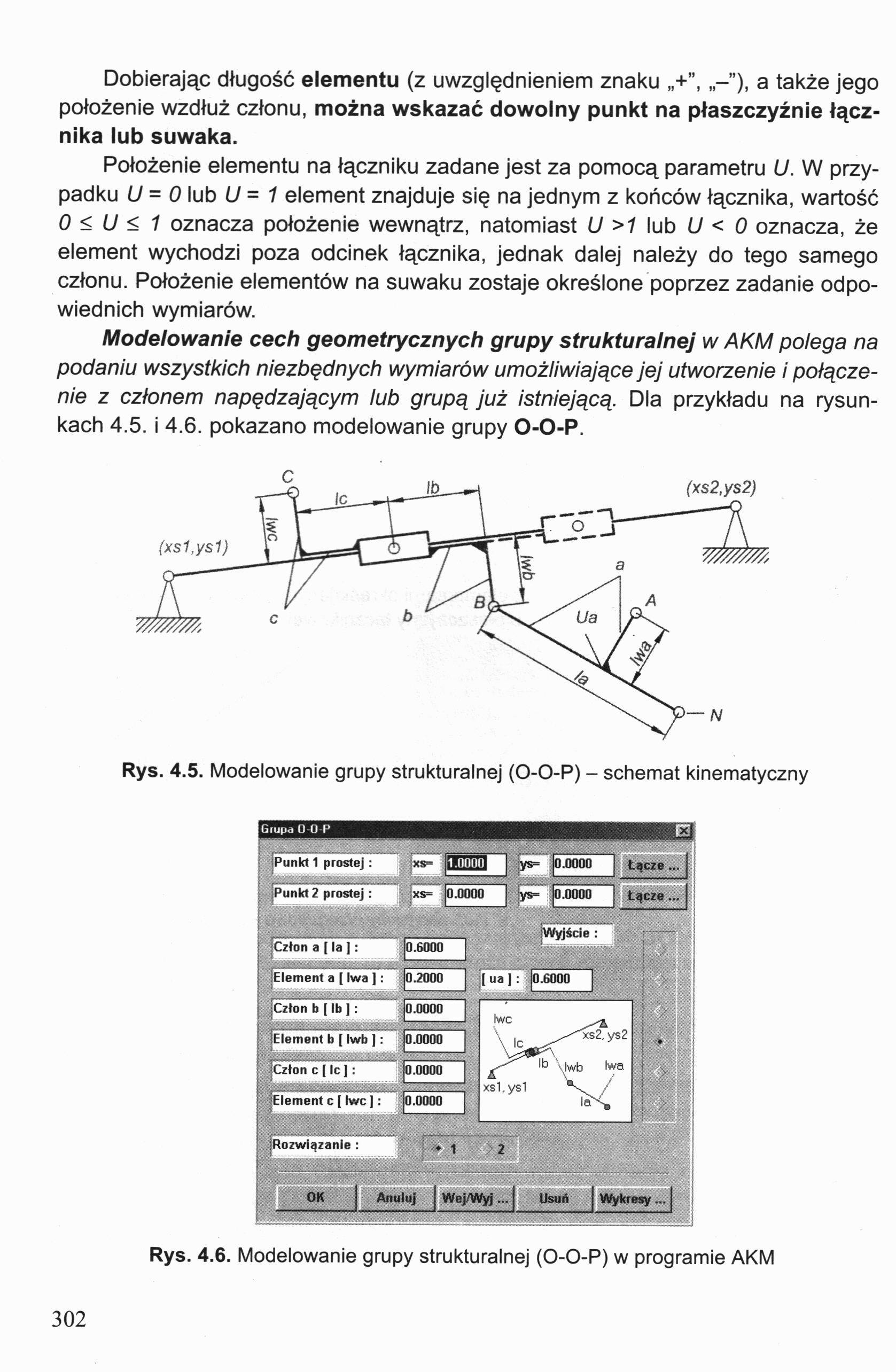
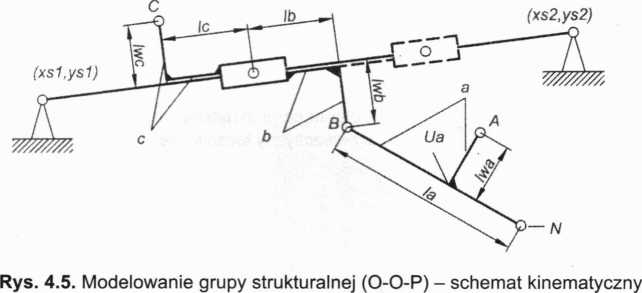
Modelowanie cech geometrycznych grupy strukturalnej w AKM polega na podaniu wszystkich niezbędnych wymiarów umożliwiające jej utworzenie i połączenie z członem napędzającym lub grupą już istniejącą. Dla przykładu na rysunkach 4.5. i 4.6. pokazano modelowanie grupy O-O-P.
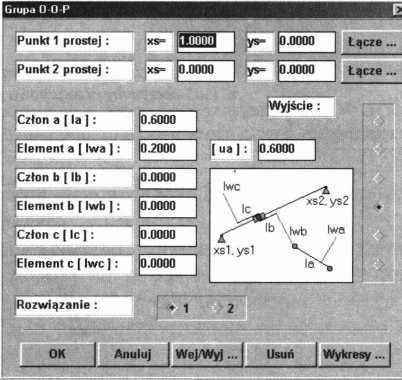
Rys. 4.6. Modelowanie grupy strukturalnej (O-O-P) w programie AKM
302
Wyszukiwarka
Podobne podstrony:
24 luty 07 (25) Etap 3. Analiza statyczna z uwzględnieniem tarcia 1M(C)=0, M3-RT03-dT3 =0 (P3.73)
24 luty 07 (14) 3.4. ANALIZA SIŁ W PARACH KINEMATYCZNYCH Z UWZGLĘDNIENIEM TARCIA Podczas ślizgowego
24 luty 07 (151) Rys. 4.3. Człony typu łącznik wraz z elementami określającymi położenie wybranych p
24 luty 07 (26) Etap 2. Analiza sił działających na człony mechanizmu bez uwzględnienia tarcia Zadan
24 luty 07 (27) Etap 3. Analiza sił działających na człony mechanizmu z uwzględnieniem sił tarcia Pr
24 luty 07 (28) Rysunek 3.57 przedstawia wieloboki sił wykonane w trakcie analizy mechanizmu bez uwz
24 luty 07 (42) Rys. 3.68. Analiza statyczna mechanizmu z uwzględnieniem tarcia: a) analiza sił dzia
24 luty 07 (44) Równania równowagi sil bez uwzględnienia tarcia (P3.118) P2 + R02 + R02 + R12 ~
24 luty 07 (47) - drgania elementów i naprężenia zmęczeniowe, -
24 luty 07 (66) Dane są masy członów mł = m3 =1 kg, m2 =2 kg umieszczone w środkach mas 8-1,82,83 or
23 luty 07 (11) Niejednokrotnie zachodzi potrzeba uwzględnienia odkształcalności (podatności) niektó
24 luty 07 Wobec symetrii mechanizmu względem osi poziomej uwalniamy od więzów tylko grupę struktura
24 luty 07 (100) Rozwiązanie Po obliczeniu zredukowanego na wał silnika momentu bezwładności układu
24 luty 07 (101) Drugą część zlinearyzowanej charakterystyki przedstawia odcinek BS prostej przechod
24 luty 07 (102) Etap 2 Rozruch układu bez obciążenia, Mb = 0, przy malejącym liniowo momencie napęd
24 luty 07 (103) Po czasie t2 = 3T prędkość kątowa osiąga 95% wartości ustalonej coust w drugim etap
24 luty 07 (104) Prędkość kątową a>p w ruchu ustalonym podczas przecinania znajdziemy z zależnośc
24 luty 07 (105) Przykład 3.31 Dany jest model fizyczny układu napędowego maszyny wyciągowej w posta
24 luty 07 (106) Rozwiązanie Rozwiązanie zadania podzielimy na sześć etapów.Etap 1 Wyznaczenie zależ
więcej podobnych podstron