Opracowanie: Artur Siara
WYKŁAD 28
TWIERDZENIE 28.1 (OSTOGRADSKIEGO - GAUSSA)
Z: ![]()
- obszar normalny względem płaszczyzn układu współrzędnych
![]()
- powierzchnia regularna zamknięta zorientowana na zewnątrz V
są określone i ciągłe na ![]()
T: 
DEFINICJA 28.1 (ZGODNOŚĆORIENTACJI PŁATA I JEGO BRZEGU)
Powiemy, że płat S i jego brzeg ∂S mają orientację zgodną z orientacją układu współrzędnych, jeżeli:
układ Oxyz jest prawoskrętny, to układ kierunek brzegu i wektor normalny jest też prawoskrętny,
układ Oxyz jest lewoskrętny, to układ kierunek na krzywej i wektor normalny do powierzchni jest też lewoskrętny.
TWIERDZENIE 28.2 (STOKESA)
Z: S - płat regularny
∂S - krzywa regularna zamknięta
P, Q, R - są określone i różniczkowalne w S ∪ ∂ S
T: 
D:
Tak więc:
![]()
![]()
(funkcja spełnia założenia twierdzenia Greena)


Ale: 
Wobec tego:

Pozostałe dwie zależności dowodzi się analogicznie.
TEORIA POLA
DEFINICJA 28.2 (POLE WEKTOROWE)
![]()
Czyli w ![]()
:
![]()
w ![]()
:
![]()
DEFINICJA 28.3 (POLE POTENCJALNE)
![]()
- nazwiemy potencjalnym
Przy czym funkcje ![]()
nazywamy potencjałem pola wektorowego ![]()
.
DEFINICJA 28.4 (ROTACJA POLA WEKTOROWEGO)

STWIERDZENIE 28.1
Pole wektorowe ![]()
jest potencjalne ![]()
WNIOSEK 28.1 (Z TW. STOKESA)
Jeżeli ![]()
w obszarze ![]()
, to całka krzywoliniowa w tym obszarze nie zależy od drogi - zależy jedynie od początku i końca krzywej - a ponadto:

WNIOSEK 28.2
Jeżeli ![]()
i są spełnione założenia tw. Stokesa, to ![]()
jest potencjalne
i 
PRZYKŁAD 28.1
sprawdzić, czy

jest potencjalneobliczyć potencjał
obliczyć 
ad a)
Analogicznie sprawdzamy dla pozostałych współrzędnych,
czyli, że: 
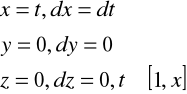
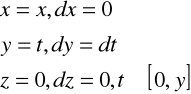
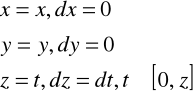
ad b)

Zał: x>0, y>0, z>0
Wobec tego:
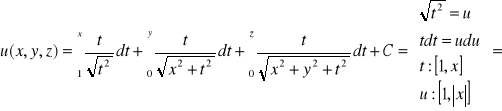
![]()
Czyli: ![]()
ad c)

DEFINICJA 28.5 (DIVERGENCJA)
Jeżeli ![]()
to 
DEFINICJA 28.6 (GRADIENT)
Mamy daną funkcję ![]()
WNIOSEK 28.3
Jeżeli ![]()
- potencjalne, ![]()
- potencjał pola ![]()
to 


Gradient potencjału jest tym samym polem.
Operator ∇ (nabla)
WNIOSKI


v
x
y
z
z
y
x
S
u
∂S
→
mają orientację zgodną z Oxyz
→
∂S
u
S
z
y
x
z = z(x,y)
D
∂D
*
L1:
L3:
L2:
L2
L1
(1,0,0)
(x,0,0)
z
y
x
(x,y,0)
(x,y,z)
L3
Wyszukiwarka
Podobne podstrony:
Wyklad25, Psychologia, biologia, Matematyka
Wyklad22, Psychologia, biologia, Matematyka
Wyklad14, Psychologia, biologia, Matematyka
Wyklad26, Psychologia, biologia, Matematyka
Wyklad18, Psychologia, biologia, Matematyka
Wyklad23, Psychologia, biologia, Matematyka
Wyklad27, Psychologia, biologia, Matematyka
Wyklad11, Psychologia, biologia, Matematyka
Wyklad24, Psychologia, biologia, Matematyka
Wyklad15, Psychologia, biologia, Matematyka
Wyklad21, Psychologia, biologia, Matematyka
Wyklad4(1), Psychologia, biologia, Matematyka
Wyklad8(1), Psychologia, biologia, Matematyka
Wyklad17, Psychologia, biologia, Matematyka
Wyklad2(1), Psychologia, biologia, Matematyka
Wyklad12(1), Psychologia, biologia, Matematyka
Wyklad5, Psychologia, biologia, Matematyka
Wyklad1ALG2001a, Psychologia, biologia, Matematyka
Wyklad20, Psychologia, biologia, Matematyka
więcej podobnych podstron