241 (23)
—
Rozdział 5.
Układy regulacji impulsowej
Uwaga1 o sposobie określania równania charakterystycznego dla liniowych układów impulsowych.
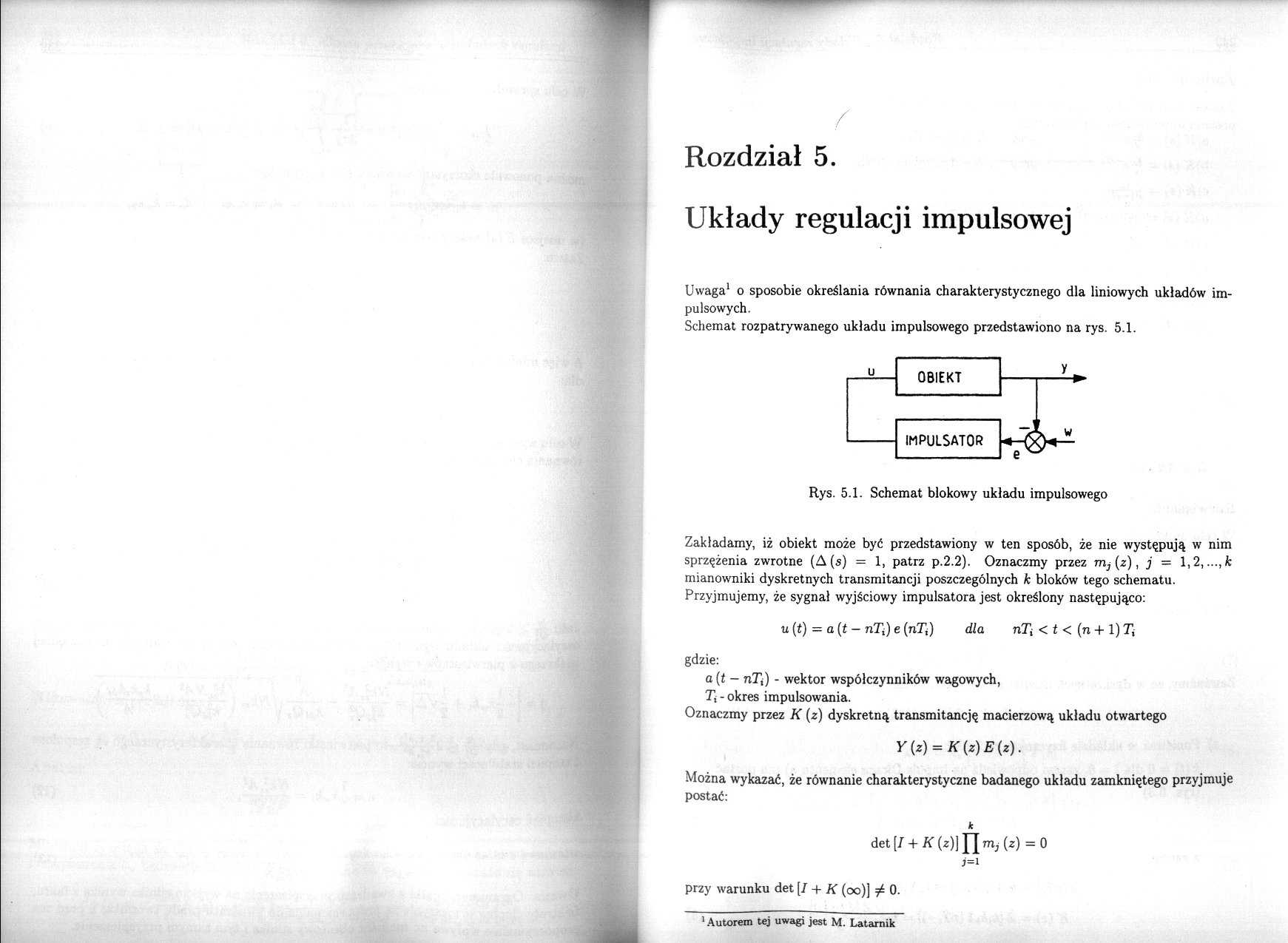
Schemat rozpatrywanego układu impulsowego przedstawiono na rys. 5.1.
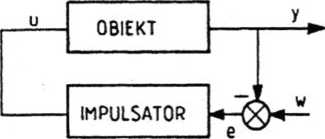
Rys. 5.1. Schemat blokowy układu impulsowego
Zakładamy, iż obiekt może być przedstawiony w ten sposób, że nie występują w nim sprzężenia zwrotne (A (s) = 1, patrz p.2.2). Oznaczmy przez m3 (z), j — 1,2, ...,fc mianowniki dyskretnych transmitancji poszczególnych k bloków tego schematu. Przyjmujemy, że sygnał wyjściowy impulsatora jest określony następująco:
u(t) = a(t — nTi) e (nTt) dla nTi < t < (n + 1) Ti
gdzie:
a (ł — nTi) - wektor współczynników wagowych,
T - okres impulsowania.
Oznaczmy przez K (z) dyskretną transmitancję macierzową układu otwartego
Y (z) = K (z) E (z).
Można wykazać, że równanie charakterystyczne badanego układu zamkniętego przyjmuje
postać:
k
det [I + K (z)] mj (z) = 0 j=i
przy warunku det [/ + K (oo)j / 0.
Autorem tej uwagi jest M. Latarnik
Wyszukiwarka
Podobne podstrony:
267 (19) 266 Rozdział 5. Układy regulacji impulsn^j mamy 0 < ifc < 2 l + £> 1 - D (13) Pon
243 (23) 242 Rozdział 5. Układy regulacji impulsowej Zadanie 5.1 5.2, gdy część ciągła Znaleźć
271 (18) 270 Rozdział 5. Układy regulacji impulsowej Po podstawieniu danych otrzymujemy: z = 0. Wida
273 (20) 272 Rozdział 5. Układy regulacji impulsowej 272 Rozdział 5. Układy regulacji
275 (19) 274 Rozdział 5. Układy regulacji impulsowej dla musi zachodzić: 0 < kikTi < Ti l-D 1
277 (20) 276 Rozdział 5. Układy regulacji impulsowej Rys. 5.34. Układ regulacji impulsowej dwóch
279 (19) 278 Rozdział 5. Układy regulacji impulsowej 278 ki(Ti Rys. 5.35. Schemat zastępczy układu
281 (19) 280 Rozdział 5. Układy regulacji impulsowej otrzymujemy z3 + A„z2 + Atz + A2 = 0. W celu sk
283 (17) 282 Rozdział 5. Układy regulacji impulsowej Transmitancję „z" układu otwartego można z
285 (17) 284 Rozdział 5. Układy regulacji impulsowej Rys. 5.37. Obszar dopuszczalnych nastaw na płas
287 (17) 286 Rozdział 5. Układy regulacji impulsowej Rys. 5.39. Obszar nastaw dopuszczalnych na płas
289 (18) 288 Rozdział 5. Układy regulacji impulsowejZadanie 5.17 Wyprowadzić warunki stabilności dla
291 (17) 290 Rozdział 5. Układy regulacji impulsowej Rys. 5.43. Układ regulacji impulsowej wielowymi
293 (18) 292 Rozdział 5. Układy regulacji impulsowej — dla równania (5) z — 1 + —Tikikj— = 0. 4 z(8)
295 (18) 294 Rozdział 5. Układy regulacji impulsowej Rozwiązanie Oznaczmy: K (s) = K„ (s) K, (s) lub
297 (17) 296 Rozdział 5. Układy regulacji impulsowej Rys. 5.49. Zastępczy schemat blokowy układu z r
299 (17) 298 Rozdział 5. Układy regulacji impulsowej czyli Qn+1 9n+2 L Qn t
245 (21) 244 Rozdział 5. Układy regulacji impulsowej Transmitancja dyskretna ma zatem postać: K{z) =
247 (24) 246 Rozdział 5. Układy regulacji impulsowej A zatem dla z > D otrzymujemy: kjk0 D T z-D
więcej podobnych podstron