24 luty 07 (118)
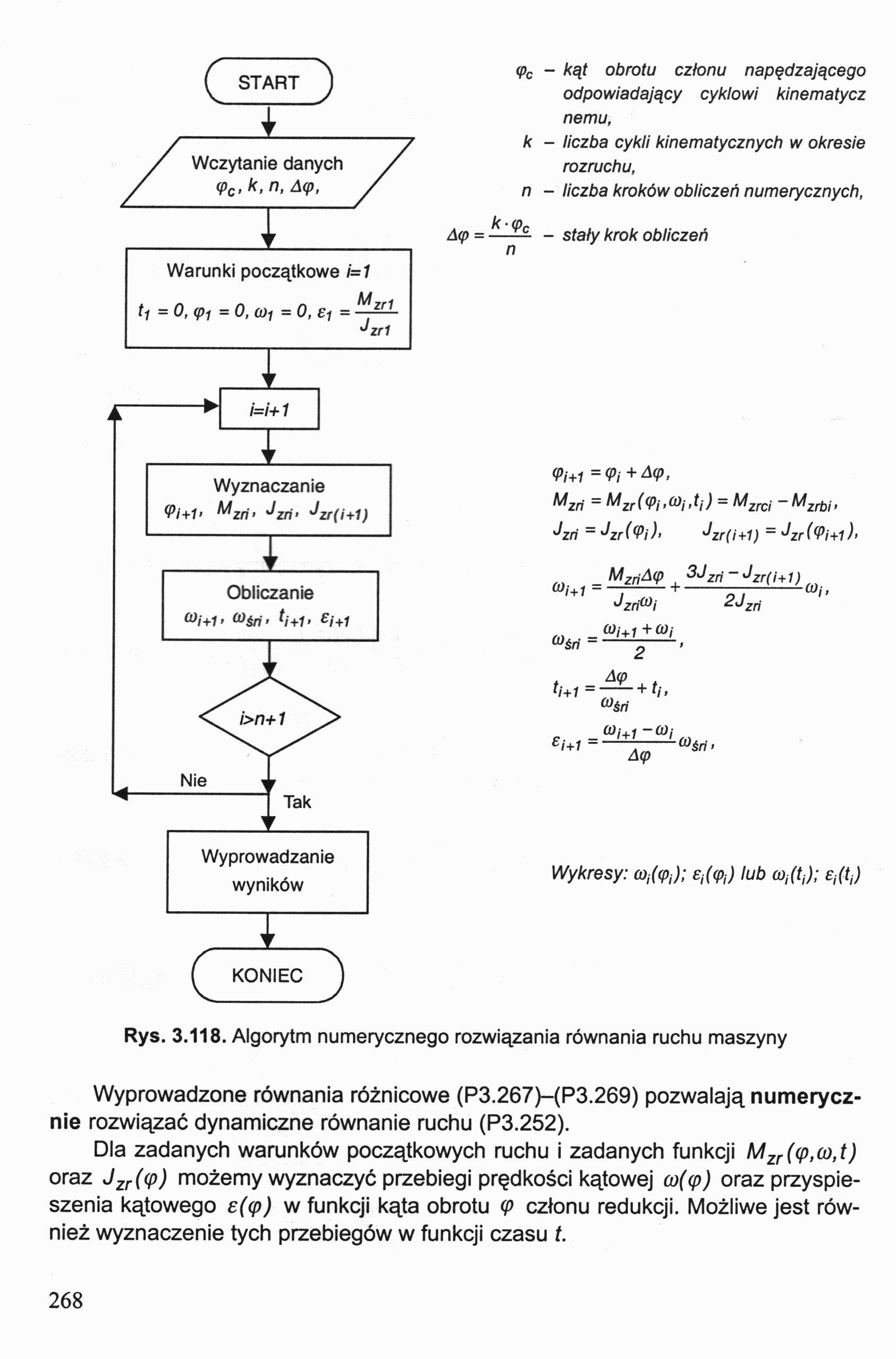
ęc - kąt obrotu członu napędzającego odpowiadający cyklowi kinematycz nemu,
k - liczba cykli kinematycznych w okresie rozruchu,
n - liczba kroków obliczeń numerycznych,
k • (o
Aę = —— - stały krok obliczeń n
<Pi+1 =<Pi + A<P,
Mzri = Mzr(<Pi,<n,,ti) = Mzrci-Mzrbi, Jzri ~ ^zr (Vi )i Jzr(i +1) ~ Jzr (<Pi+1 )>
_MzriAtp , 3Jzri-JZr(i+i)
JzntOj 2Jzrl
®i+1 ~ , + oi ^/»
coiri=^P-,
ei+1--T~ ®śri>
A(p
Wykresy: aję,); lub coM); e,fU
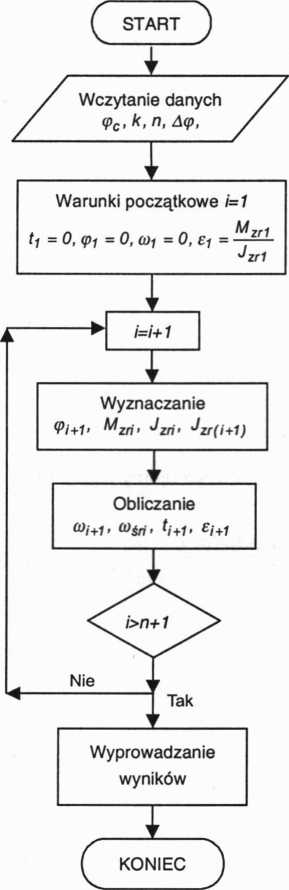
Rys. 3.118. Algorytm numerycznego rozwiązania równania ruchu maszyny
Wyprowadzone równania różnicowe (P3.267)-(P3.269) pozwalają numerycznie rozwiązać dynamiczne równanie ruchu (P3.252).
Dla zadanych warunków początkowych ruchu i zadanych funkcji Mzr((p,co,t) oraz Jzr(cp) możemy wyznaczyć przebiegi prędkości kątowej co(ę) oraz przyspieszenia kątowego e((p) w funkcji kąta obrotu (p członu redukcji. Możliwe jest również wyznaczenie tych przebiegów w funkcji czasu f.
268
Wyszukiwarka
Podobne podstrony:
24 luty 07 (79) Energia kinetyczna /-tego członu wykonującego ruch postępowy wyraża się wzorem 7
24 luty 07 (95) Uwaga. Równania (3.118) lub (3.119) nazywamy równaniami ruchu członu redukcji w post
24 luty 07 (115) Przykład 3.34 Masy i siły działające na człony maszyny zredukowano do członu napędz
24 luty 07 (16) Rys. 3.43. Stożek tarcia pary kinematycznej Rkt = -R,k - całkowita reakcja w parze p
24 luty 07 (20) Rys. 3.48. Analiza wykreślna warunku równowagi granicznej członu podpartego na podpo
24 luty 07 (27) Etap 3. Analiza sił działających na człony mechanizmu z uwzględnieniem sił tarcia Pr
24 luty 07 (2) c* ^ b) Rys. 3.36. Analiza sił działających na człon napędzający: a) uwalnianie od wi
24 luty 07 (44) Równania równowagi sil bez uwzględnienia tarcia (P3.118) P2 + R02 + R02 + R12 ~
24 luty 07 (53) Jeśli spełnione są równocześnie warunki (3.69) / (3.70), wówczas oś obrotu jest głów
24 luty 07 (69) Warunki równoważności członu o masie rozłożonej w sposób ciągły i zbioru mas skupion
24 luty 07 (70) Zastąpienie członu 2 dwiema masami zastępczymi m2B, <^2C nie zmienia jego masy, j
24 luty 07 (83) Po wprowadzeniu oznaczeń równanie (3.98) dla członu redukcji wykonującego ruch postę
24 luty 07 (86) W celu wyznaczenia Pzri posługujemy się modelem członu redukcji (rys. 3.99a), natomi
23 luty 07 (118) W mechanizmach i maszynach wolnobieżnych, gdzie siły bezwładności są małe w porówna
23 luty 07 (81) prędkości i przyspieszeń kątowych członu przyjęto przeciwnie do ruchu wskazówek zega
24 luty 07 Wobec symetrii mechanizmu względem osi poziomej uwalniamy od więzów tylko grupę struktura
24 luty 07 (100) Rozwiązanie Po obliczeniu zredukowanego na wał silnika momentu bezwładności układu
24 luty 07 (101) Drugą część zlinearyzowanej charakterystyki przedstawia odcinek BS prostej przechod
24 luty 07 (102) Etap 2 Rozruch układu bez obciążenia, Mb = 0, przy malejącym liniowo momencie napęd
więcej podobnych podstron