24 luty 07 (43)
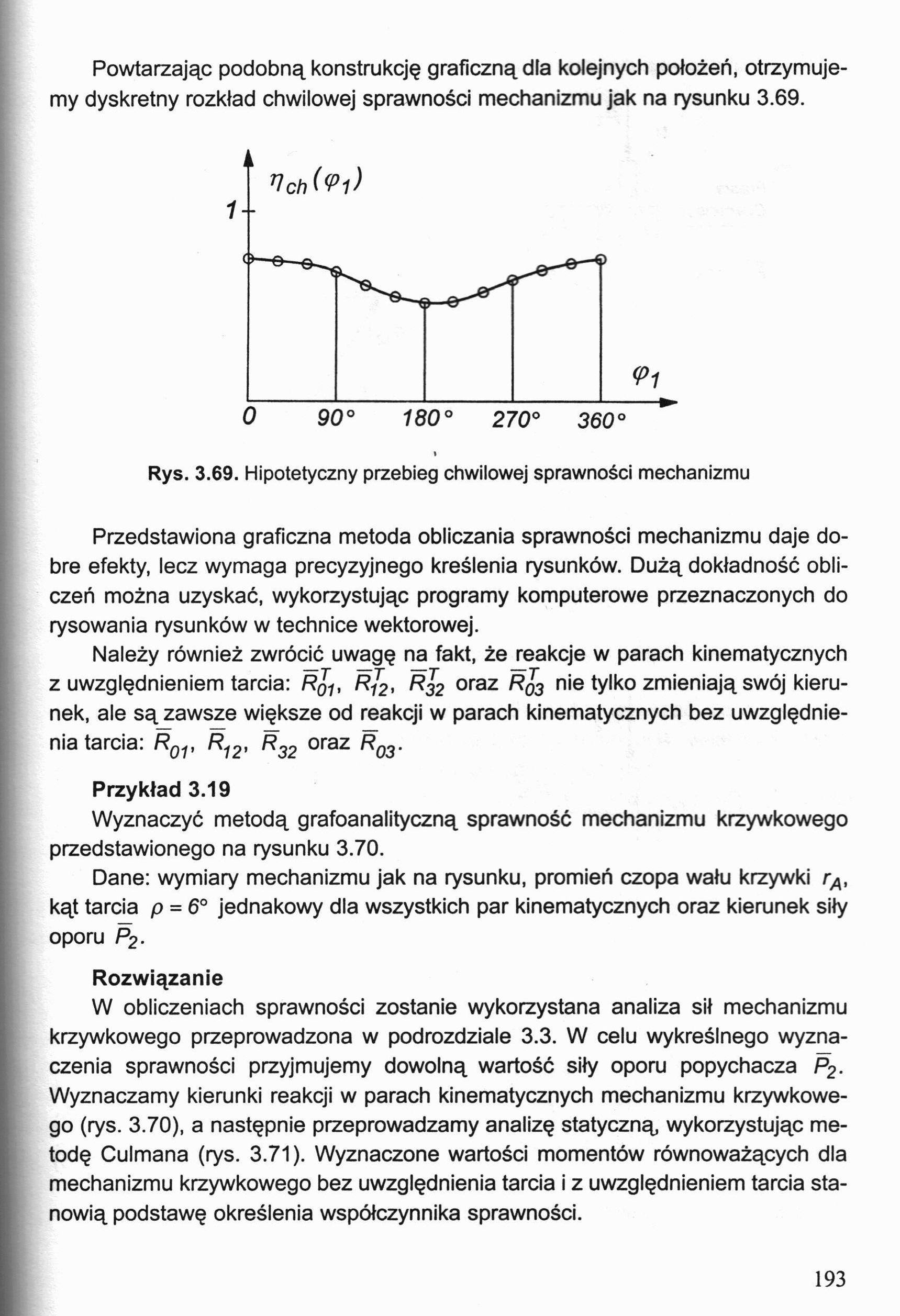
Powtarzając podobną konstrukcję graficzną dla kolejnych położeń, otrzymujemy dyskretny rozkład chwilowej sprawności mechanizmu jak na rysunku 3.69.
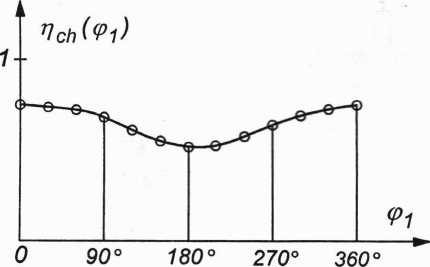
Rys. 3.69. Hipotetyczny przebieg chwilowej sprawności mechanizmu
Przedstawiona graficzna metoda obliczania sprawności mechanizmu daje dobre efekty, lecz wymaga precyzyjnego kreślenia rysunków. Dużą dokładność obliczeń można uzyskać, wykorzystując programy komputerowe przeznaczonych do rysowania rysunków w technice wektorowej.
Należy również zwrócić uwagę na fakt, że reakcje w parach kinematycznych z uwzględnieniem tarcia: RQ1t rJ2. P32 oraz ^03 nie tylko zmieniają swój kierunek, ale są zawsze większe od reakcji w parach kinematycznych bez uwzględnienia tarcia: Rqv R12, R32 oraz RQ3.
Przykład 3.19
Wyznaczyć metodą grafoanalityczną sprawność mechanizmu krzywkowego przedstawionego na rysunku 3.70.
Dane: wymiary mechanizmu jak na rysunku, promień czopa wału krzywki rA, kąt tarcia p = 6° jednakowy dla wszystkich par kinematycznych oraz kierunek siły oporu P2.
Rozwiązanie
W obliczeniach sprawności zostanie wykorzystana analiza sił mechanizmu krzywkowego przeprowadzona w podrozdziale 3.3. W celu wykreślnego wyznaczenia sprawności przyjmujemy dowolną wartość siły oporu popychacza P2. Wyznaczamy kierunki reakcji w parach kinematycznych mechanizmu krzywkowego (rys. 3.70), a następnie przeprowadzamy analizę statyczną wykorzystując metodę Culmana (rys. 3.71). Wyznaczone wartości momentów równoważących dla mechanizmu krzywkowego bez uwzględnienia tarcia i z uwzględnieniem tarcia stanowią podstawę określenia współczynnika sprawności.
193
Wyszukiwarka
Podobne podstrony:
24 luty 07 (3) Metoda Culmana umożliwia rozwiązanie graficzne zagadnienia równowagi czterech sił o z
24 luty 07 (141) Rozwiązując równanie (P3.287) dla zadanych warunków początkowych, mamy: -
24 luty 07 (98) Z zależności (3.134) wynika, że dla okresu ruchu ustalonego maszyny praca sił czynny
24 luty 07 (16) Rys. 3.43. Stożek tarcia pary kinematycznej Rkt = -R,k - całkowita reakcja w parze p
24 luty 07 (34) Moc sił tarcia w mechanizmach zależy od wielu parametrów konstrukcyjnych, kinematycz
24 luty 07 (4) Rys. 3.37. Graficzne rozwiązanie zagadnienia równowagi płaskiego dowolnego układu czt
24 luty 07 (56) Założymy, że wał wirnika jest konstrukcyjnie i technologicznie wyrównoważo-ny. Stan
24 luty 07 (57) Ścisłe spełnienie warunków wyrównoważenia dynamicznego wirnika na etapie konstruowan
24 luty 07 (78) b)W/M. zr zr m zr Rys. 3.95. Jednomasowe modele graficzne członów redukcji: a) człon
23 luty 07 (43) Przyspieszenie kątowe: (2.2c) (2.2d) (2.2e) (2-2f) e(t) = (0,0,e(t)), e(t) = ^ = ^-
24 luty 07 Wobec symetrii mechanizmu względem osi poziomej uwalniamy od więzów tylko grupę struktura
24 luty 07 (100) Rozwiązanie Po obliczeniu zredukowanego na wał silnika momentu bezwładności układu
24 luty 07 (101) Drugą część zlinearyzowanej charakterystyki przedstawia odcinek BS prostej przechod
24 luty 07 (102) Etap 2 Rozruch układu bez obciążenia, Mb = 0, przy malejącym liniowo momencie napęd
24 luty 07 (103) Po czasie t2 = 3T prędkość kątowa osiąga 95% wartości ustalonej coust w drugim etap
24 luty 07 (104) Prędkość kątową a>p w ruchu ustalonym podczas przecinania znajdziemy z zależnośc
24 luty 07 (105) Przykład 3.31 Dany jest model fizyczny układu napędowego maszyny wyciągowej w posta
24 luty 07 (106) Rozwiązanie Rozwiązanie zadania podzielimy na sześć etapów.Etap 1 Wyznaczenie zależ
24 luty 07 (107) Wyznaczenie pozostałych zależności (P3.204) D cos = m1; (Oj = cob; vA = rjcoj; vB =
więcej podobnych podstron