23 luty 07 (95)
(2.38)
prędkość obwodowa
di Ć2
V0 =®ry = “2~
gdzie:
t - podziałka zazębienia, z - liczba zębów.
|
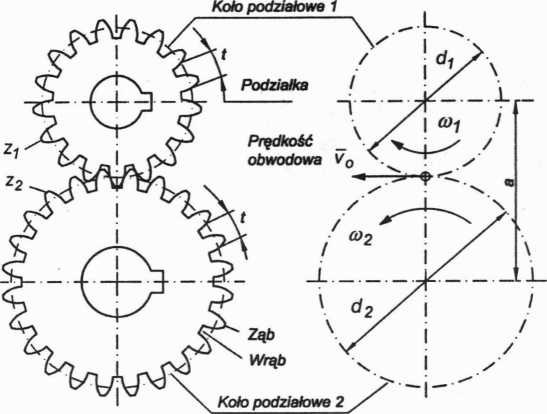
odległość osi pary kół |
, . m a = (z2 +Zi)-— |
(2.39) |
|
przełożenie kierunkowe |
co-j c/2 m-z2 z2 ’12 ci)2 d-i mzi z. |
(2.40) |
Rys. 2.33. Zależności geometryczne i kinematyczne dla przekładni zębatej o zazębieniu zewnętrznym
93
Wyszukiwarka
Podobne podstrony:
23 luty 07 (111) Zróżnicowanie prędkości kół umożliwia przekładnia stożkowa złożona z kół 3, 4 i 5,
23 luty 07 (101) Rys. 2.44. Schematy przekładni obiegowej z zaznaczonymi prędkościami kątowymi: a) b
23 luty 07 (106) Znak (-) we wzorze (P2.102) oznacza, że zwrot prędkości kątowej satelity 2 jest prz
23 luty 07 (38) 2. ANALIZA KINEMATYCZNA MECHANIZMÓW PŁASKICH2.1. CELI ZAKRESANALIZY KINEMATYCZNEJ ME
23 luty 07 (42) W ruchu postępowym przewodnia prędkości i przewodnia przyspieszeń prostej ruchomej,
23 luty 07 (44) W ruchu obrotowym przewodnia prędkości i przewodnia przyspieszeń prostej ruchomej są
23 luty 07 (46) VCB Składanie prędkości unoszenia i prędkości względnej Rys. 2.7. Wyznaczanie przewo
23 luty 07 (48) Prędkość vB i przyspieszenie aB wynikają z postępowego ruchu unoszenia, prędkość vCB
23 luty 07 (51) Prędkość bezwzględna vb w ruchu złożonym vb=vu+vw (2.7) gdzie: vu
23 luty 07 (54) graficzne wektorów prędkości i przyspieszeń stanowiących odpowiedniki wektorów rzecz
23 luty 07 (55) Oznacza to, że długości rysunkowe wektorów prędkości liniowej oraz przyspieszenia li
23 luty 07 (56) Kolejność postępowania w metodzie planów prędkości i przyspieszeń: 1. &n
23 luty 07 (57) Następnie piszemy równanie prędkości punktu C, traktując ruch łącznika 2 jako ruch z
23 luty 07 (60) Przykład 2.2 Mechanizm czworoboku przegubowego Wyznaczymy metodą planów prędkości i
23 luty 07 (61) Prędkość punktu K znajdziemy na podstawie układu równań (P2.13), porównując ich praw
23 luty 07 (65) Następnie zapisujemy równanie prędkości punktu S2, który znajduje się na członie 2 s
23 luty 07 (67) Przedstawione na rysunkach 2.15-2.20 plany prędkości i przyspieszeń pozwalają na dok
23 luty 07 (68) Ponieważ suwak 3 obraca się razem z jarzmem, to jego prędkość kątowa jest równa pręd
23 luty 07 (71) Przykład 2.5 Mechanizm Oidhama Wyznaczymy metodą planów prędkość i przyspieszenie li
więcej podobnych podstron